| Een toerentalsensor wordt normaal niet gebruikt bij een verwarmingsinstallatie (misschien wel bij grote installaties om het toerental van de pompen te controleren...). Dergelijke sensoren worden echter veelvuldig gebruikt in bepaalde takken van de industrie: ABS sensoren in auto's, snelheidscontrole in een transportband, enz. |
-
|
We bespreken hier enkel de magnetische rotatiesensoren. Er bestaan ook contactloze detectoren die met een gereflekteerde lichtstraal werken, maar die worden minder en minder gebruikt. In industrieele toepassingen worden ze niet meer ingezet (verminderde betrouwbaarheid als de installatie vuil wordt).
Magnetische sensor met spoel en magneetDit is de basis sensor die in veel toepassingen gebruikt werd. De sensor bestaat uit een spoel die in een magnetisch veld zit (pick up coil). De impulsgever is een tandwiel uit ferromagnetisch materiaal (weekijzer of staal).Het magnetisch veld wordt geproduceerd door een permanente magneet en het veld wordt geconcentreerd door een metalen pool. Als een tand voor de pool komt, dan wordt het magnetisch veld versterkt, tussen twee tanden is het magnetisch veld zwakker. Deze wisseling wordt door de spoel opgevangen en produceert een kleine wisselspanning. De werking is vergelijkbaar met die van een electrische gitaar met stalen snaren. De spoel detecteert enkel de veranderingen in het magnetisch veld en produceert een kleine spanningspiek bij de doorgang van iedere tand. Als het wiel sneller draait, worden er meer pulsen per tijdeenheid geproduceerd. De sensor kan niet de aanwezigheid van een (vaste) massa detecteren. De afstand van sensor tot het tandwiel moet binnen zeer stricte grenzen liggen om een correcte meting te garanderen. De normale afstand bedraagt 1mm. De amplitude van het signaal kan variëren naargelang de afstand van sensor tot tandwiel: daarom volgt er op de spoel een versterker die het signaal zo sterk zal versterken dat er enkel goed gedefinieerde rechthoekigen pulsen overblijven.
Magnetische sensor met spoel zonder magneetMen heeft heel snel opgemerkt dan men het magneetje achterwege kon laten, als men een stroompje in de spoel stuurde. De spoel produceert nu zelf het magnetisch veld. Het magnetisch veld wordt nog steeds versterkt door de aanwezigheid van de tanden, en deze verandering van het veld wordt opgepikt door de spoel. Er ontstaat een kleine gesuperponeerde wisselspanning op de gelijkspanning die voor de bekrachtiging dient.Di is de standaard sensor die algemeen gebruikt werd voor de komst van de hall sensoren. Deze sensoren werden vroeger zo vaak gebruikt, dat ze een de-facto standaard werden. De sensor heeft slechts twee aansluitingen en wordt gevolgd door een versterker die eveneens de bekrachtigingsstroom levert.
Sensor met hall effektTegenwoordig gebruikt men voornamelijk hall detectoren die als voordeel hebben dat alle componenten in één enkele behuizing geplaatst kunnen worden (sonde + versterker).De losse hall detector heeft de vorm van een kleine transistor met 3 poten (massa, voeding en uitgang). De detector wordt gevolgd door een versterker die een rechthoekspanning met goed gedefinieerde flanken produceert.
Electrisch gezien werkt de sensor met twee aansluitdraden zoals een sensor met spoel zonder magneet (en kan in sommige gevallen de sensor met spoel vervangen). De voedingsspanning wordt door de hall detector en de versterker gebruikt. De versterker moduleert de voedingsspanning zoals een spoel dat zou doen. In de praktijk bekomt men een kleine wisselspanning over de sensor (gevoed met een constante stroom). Men kan het verschil merken tussen een sensor met spoel en een sensor met hall-voeler door de weerstand te meten met een multimeter. De weerstand is nagenoeg oneindig bij een sensor met hall-voeler omdat de lage meetspanning te laag is om de voeler te doen werken. De sensor met spoel heeft altijd een vaste ohmse weerstand. De hall sensor werkt als "naderingsschakelaar" die reageert op de aanwezigheid van een metalen massa tegenover de sensor. Gevoed met een constante stroom van 1mA zal de sensor een verschillende spanningsval produceren naargelang de aanwezigheid van een metalen massa (een magnetische pick-up reageert enkel of veranderingen van het magnetisch veld).
De sensor met drie dragen heeft twee draden voor de voeding, en met de derde draad kan bijvoorbeeld een relais bediend worden (naderingsschakelaar).
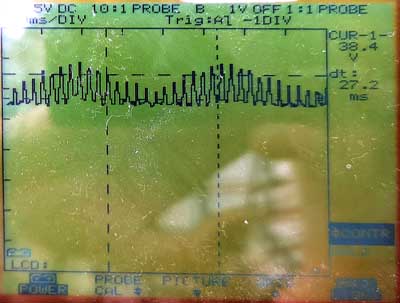
Waar ik werk worden er regelmatig motoren getest. Als er geen toerentalindicatie is, dan zijn er meerdere oorzaken: defekte sensor, verkeerde afstand van de sensor tot de tandwiel, defekte kabel of defekte versterker. Het is zeer interessant om een deel van de installatie te kunnen testen zonder de motor te moeten laten draaien. De schakeling levert een pulsspanning van ongeveer 440Hz en gedraagt zich electrisch zoals een echte toerentalsensor (met fantom-voeding). De dynamische weerstand van zo'n sensor varieert van 1kΩ tot 7kΩ. De generator begint te werken vanaf een spanning van 2.5V (de 2N6660 is een mosfet die in geleiding komt vanaf een spanning van 2V). De schakeling wordt gewoon in de installatie opgenomen in de plaats van de sensor (met twee draden aansluiten: als er een extra massa draad aanwezig is moet die niet gebruikt worden). De sensor met zijn schijf staat rechts afgebeeld. Iedere keer dat er een gat onder de sensor passeert vermindert het lokaal magnetisch veld en is er een positieve puls op de uitgang. Door de skoopbeeld te bekijken is het mogelijk te bepalen op de sensor te dicht of te ver staat, maar ook of de schijf wel recht gemonteerd staat. Men ziet de positieve pulsen iedere keer dat een gat onder de sensor passeert. Maar wat men ook opmerkt, is dat de gemiddelde amplitude variieert met de rotatie van de schijf (de schijf heeft 15 gaatjes). Op een bepaalde positie worden de gaten nauwelijks gedetecteerd, maar als de schijf 180° gedraaid is worden de gaten wel goed gedetecteerd. Men kan dus zeggen dat de schijf niet perfekt recht gemonteerd is: de afstand van de plaat tot de sensor verandert met de rotatie. Staat de sensor te dicht of te ver? Het minimum niveau (dat overeenkomt met de detectie van het metaal) ligt goed vast: metaal wordt altijd gedetecteerd. Het maximum niveau is echter niet vast: de gaten worden soms goed en soms minder goed gedetecteerd. Dit wordt veroorzaakt door de sensor die te dicht bij de schijf staat. Om een correcte uitlezing te bekomen, zelfs met een schijf die niet perfekt vlak is en met een afstand die buiten de toleranties zit moeten de gaten groot genoeg zijn om een voldoende verzwakking van het magnetisch veld te hebben. Hier is dat niet het geval: de gaatjes zijn te klein om het magnetisch veld voldoende te reduceren. |


Publicités - Reklame