De Ward Leonardschakeling voor liften werd gebruikt na de tweede wereldoorlog en maakte en nauwkeurige en soepele sturing van de liftkooi mogelijk.
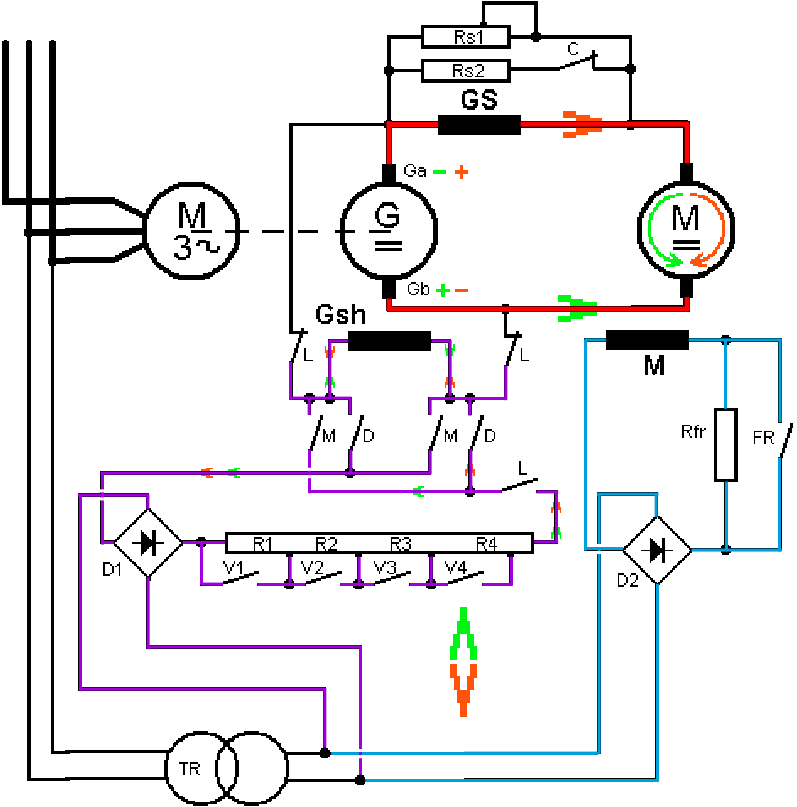
De installatie bestaat uit een driefasige motor die een dynamo aandrijft. De motor wordt in werking gesteld van zodra de lift gebruikt zal worden. Men kan zowel een synchrone als een asynchrone motor gebruiken.
De dynamo G heeft een serie en een shuntwikkeling (GS, schakeling in het rood en Gsh, schakeling in het paars), de gelijkstroommotor heeft een externe bekrachtiging M (blauw).
Een transfo TR zorgt voor een aangepaste spanning voor de bekrachtiging. Men kan hier ook een driefasige transfo en gelijkrichter gebruiken in de grote installaties. Voor de tweede wereldoorlog, toen er nog geen geschikte gelijkrichters bestonden gebruikte men een extra bekrachtigingsdynamo.
De schakeling is in rusttoestand getekend.
Ruststand:
Via de contacten L wordt de veldwikkeling van de dynamo gevoed door zijn eigen stroom, maar de polariteit is zodanig dat de veldwikkeling het remanent magnetisme tegenwerkt: in plaats van een verhoging van de dynamospanning te bekomen, bekomt men dat de uitgangsspanning nul wordt (anti shunt montage). Daardoor is er geen kans dat de motor gaat draaien.
Lift stijgt:
De kontacten L schakelen om en de contacten M en FR worden aangetrokken.
Daardoor wordt de veldwikkeling van de dynamo gevoed, zodat de dynamo stroom levert aan de motor.
Door het contact FR wordt de motor overbekrachtigd tijdens het op snelheid komen zodat er een hoger koppel geleverd kan worden.
De V-kontacten worden één per één uitgeschakeld, waardoor de bekrachtiging sterker wordt, en dus ook de dynamospanning. De snelheid van de motor wordt soepel opgevoerd.
Als de nominale snelheid bijna bereikt wordt, valt contact FR af, waardoor de motorsnelheid zijn nominale waarde kan halen.
Indien de motor zwaarder belast wordt en trager gaat draaien, dan wordt zijn tegen-EMK lager. De stroom door de motor neemt dus toe, en dus ook de stroom door de seriewikkeling GS van de dynamo. De motorspanning stijgt, waardoor zijn toerental ook stijgt.
Door de instelling van weerstand Rs1 kan men ervoor zorgen dat de motorsnelheid constant en stabiel blijft ongeacht de belasting.
Lift komt aan (vertragen):
Het contact FR sluit, waardoor dat de motor overbekrachtigd wordt. Zijn snelheid neemt wat af, maar het koppel wordt hoger.
De snelheidscontacten V vallen één na één af, waardoor er een grotere weerstand in serie met de veldwikkeling van de dynamo komt. Zijn spanning daalt, en dus ook de snelheid van de liftmotor.
Uiteindelijk valt het contact M af en schakelt het contact L om, waardoor de dynamo geen spanning meer levert.
Lift daalt:
Zelfde werkwijze, maar het contact D wordt gesloten in plaats van het contact M. De veldwikkeling is in omgekeerde zin, waardoor de dynamo een omgekeerde spanning levert. De motor draait in de andere richting.
Positiecorrectie:
Als de kooi geladen of gelost wordt, dan veranderd zijn positie lichtjes. Om de positie te rectifiëren moet de motor op een zeer lage snelheid draaien, maar met een hoog koppel.
Het contact C wordt geöpend, waardoor de dynamo overgecompenseerd wordt, het contact FR wordt gesloten waardoor de motor overbekrachtigd wordt, en dan wordt de laagste snelheid ingeschakeld.
Ten gevolge van de veldvertraging in de dynamo worden de schakeltrappen van de contacteur uitgemiddeld, waardoor men een mooi gelijkmatige versnelling en vertraging van de motor bekomt. Bij het veranderen van de spanning door het in- of uitschakelen van weerstanden duurt het een tijdje vooraleer de stroom veranderd door de hoge zelfinductie van de veldwikkeling.
De mechanische rem van de lift wordt samen bedient met relais L.
Regeneratief remmen
Het is mogelijk energie terug op het net te steken (vierkwadrantenbedrijf), zowel als de aandrijfmotor een synchrone of een asynchrone motor is. Bij een synchrone motor gedraagt de motor zich als alternator en bij een asynchrone motor als een hypersynchrone generator.
In het algemeen zal men de voorkeur geven aan een asynchrone motor/generator die een eenvoudigere constructie heeft (geen sleepringen) en een betere koppelkromme heeft, maar de snelheid van de motor/dynamo kan variëren naargelang kwadrant waarin het systeem zich bevindt (hyposynchroon of hypersynchroon).
Een Ward Leonard schakeling heeft naast zijn soepele werking nog een belangrijk voordeel: de sturing vergt slechts een beperkte stroom die door een kleine contacteur geschakeld kan worden (bekrachtiging). Zelfs het omkeren van de draairichting gebeurt door een kleine schakelaar.
|