-
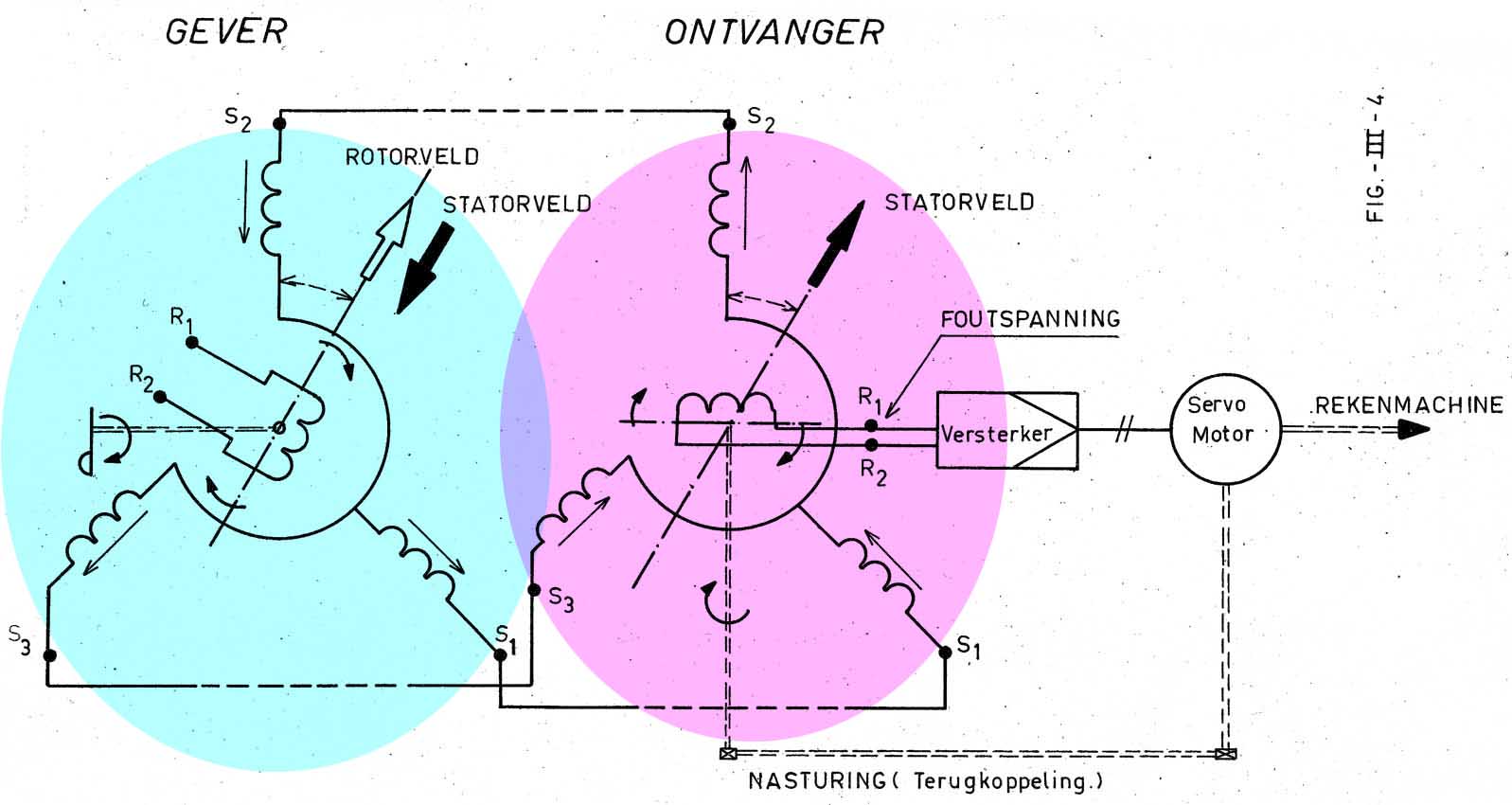
ServoregelingHet koppel dat door een synchro of selsyn overgedragen wordt is beperkt omdat het koppel afneemt naarmate beide synchros naar dezelfde richting wijzen. Hoe groter het koppel dat overwonnen moet worden, hoe groter de hoekfout tussen zender en ontvanger. Indien er zwaardere belastingen aangedreven moeten worden, dan gebruikt men een servo-systeem die het foutsignaal versterkt en naar een externe motor stuurt die de ontvanger bijregelt totdat de fout nagenoeg verdwenen is.In plaats van een mechanisch signaal te leveren (verdraaing van de synchro ontvanger) kan de ontvangende synchro ook gebruikt worden om een electrisch signaal te leveren. De rotor van de ontvanger wordt daarbij niet op de referentiespanning aangesloten, maar levert een foutsignaal die afhangt van de hoekfout tussen zender en ontvanger. Het signaal wordt gedetecteerd door een synchrone demodulator en men bekomt een positief of negatief signaal naargelang de fout (hoekverschil tussen de eerste en tweede synchro) positief of negatief is. Dit foutsignaal wordt gedetecteerd en versterkt en stuurt een motor die de fout zal wegwerken. Zo'n systeem wordt bijvoorbeeld gebruikt in de repeater van een gyrocompas. Het moedercompas heeft een transmitter (die de gyro niet belast) en het signaal wordt naar alle repeaters gestuurd. De ontvangende synchro in iedere repeater levert een foutsignaal die versterkt wordt en een motor aandrijft die de aanwijzer bijstelt totdat de fout nul geworden is. Zo wordt de restfout (die met een selsyn niet weggewerkt kan worden) verkleind. De tweede schakeling geeft een complete overzicht van een servo systeem met twee synchro's. Tussen de rotor van de ontvanger en de versterker is er nog een synchrone demodulator die gevoed wordt met de voedingspanning van de zender. Men gebruikt specifieke synchro's die aan de taak aangepast zijn:
Terwijl een selsyn enkel geschikt is om kleine draaimomenten over te brengen, kan men met een servoregeling zware lasten bedieden. De eerste synchro geeft de gewenste waarde aan (bijvoorbeeld de gewenste elevatie of het gewenst azimut van een kanon) terwijl de tweede synchro het effktief azimut van het kanon aangeeft. Het zwak signaal wordt door een amplidyne versterkt (magnetische versterker) en de motor die het kanon moet richten wordt gevoed uit een Ward-Leonardschakeling. Nu gebruikt men natuurlijk geen amplidynes en Ward-Leonardschakelingen meer, de versterking gebeurt door vermogentransistoren die de motor sturen, maar de synchro's worden nog altijd gebruikt omdat ze goed bestand zijn tegen schokken en barre weersomstandigheden. Als de referentiespanning aangelegd wordt op de rotor van de ontvangende synchro dan bekomt men een overdracht van het koppel (torque transmitter). Als men de spanning aan de rotor gewoon meet, dan bekomt men een foutsignaal (hoekverschil tussen beide synchros), de synchros worden als control transmitter gebruikt. Er is gewoon een meting van de positie, geen overdracht van het koppel. Een torque transmitter synchro kan in de plaats van een control transmitter synchro gebruikt worden, maar niet omgekeerd: een torque transmitter is in staat wat meer vermogen te leveren om de ontvanger te doen draaien. Ook aan de kant van de ontvanger zijn er verschillen tussen koppeloverdracht (torque) en signaaloverdracht (control). Een control ontvanger heeft statorspoelen bestaande uit veel wikkelingen van fijn draad om een sterk magnetisch veld te bekomen met een lage stroom. In een normale synchro gaat de rotor zich plaatsen zodat de statorstromen minimaal zijn (men zegt dat de synchros in dekking zijn). De statorwikkelingen kunnen hier oververhit geraken als de synchro vast zit omdat er een hoge stroom door de statorspoelen blijft lopen.
Torque Differential TransmitterEen TDX (Torque Differential Transmitter) is een bijzondere synchro die gebruikt wordt om het verschil tussen twee hoeken te meten. Een dergelijke keten bestaat uit een normale transmitter, een TDX en een ontvanger die zich richt volgens het hoekverschil. De TDX zelf heeft geen ingang voor de referentiespanning, maar gebruikt in de plaats het signaal van de transmitter. De rotor bestaat hier uit drie wikkelingen in plaats van één wikkeling bij een normale synchro.Daarmee is het eenvoudig twee hoekposities te vergelijken, de transmitter meet bijvoorbeeld de gewenste positie aan en de TDX meet de effektieve positie van een apparaat. De uitgangssynchro ontvangt een verschilsignaal (foutsignaal) en bedient een hydraulische klep die het apparaat in de juiste positie zal zetten. Als de hoekfout verdwenen is, dan is ook het foutsignaal afwezig en zet de ontvanger zich in nul-positie waarbij de hydraulische klep niet meer bediend wordt. De ontvanger kan zowel een positieve of een negatieve fout aangeven. De TDX bestaat ook in CDX-versie (Control Differential Transmitter) waarbij men een uitgangsspanning als uitgang bekomt. Deze schakeling wordt minder toegepast. |
Publicités - Reklame