-
|
Je weet dat je met dode materie te maken hebt als je een begrip in google intypt en je geen enkel resultaat bekomt. "Rekensynchro" is zo'n woord. De rekensynchro is in feite een resolver die voor berekeningen gebruikt werd, in een tijd dat er nog geen betrouwbare computers bestonden.
Meer informatie is te vinden op de pagina over synchros, resolvers en selsyns.
Tijdens en na de oorlog werden de schepen beschermd tegen de magnetische mijnen door deperming, het verminderen van de magnetische signatuur van een schip. Dit was voldoende geacht voor de schepen die langs de veilige routes vaarden, maar niet voor de mijnenvegers die aktief op zoek moesten gaan naar de mijnen. De sonar was toen heel rudimentair: de mijnen konden niet gedetecteerd worden. Het was dus zeer belangrijk dat de mijnenvegers onzichtbaar waren voor de magnetische mijnen. De installatie moest heel betrouwbaar zijn en in alle omstandigheden kunnen werken. Men beschikte toen niet over getransistoriseerde versterkers en magnetische sondes, laat staan computers om het correctieveld te berekenen. De mijnenvegers leken nog het meest op visschersboten (de eerste mijnenvegers tijdens de oorlog waren inderdaad omgebouwde vissersboten). Men beschikte toen reeds over electronenbuizen die een vermogen van meerdere kW kon leveren (bijvoorbeeld gebruikt in radars), maar deze werden niet betrouwbaar genoeg gezien om gebruikt te worden op kleine, koude, vochtige schepen. Een schip heeft een permanent magnetisme (alle ferromagnetische metalen kunnen gemagnetiseerd geraken en vormen dan een zwakke magneet). Het permanent magnetisme kan op eenvoudige wijze geneutraliseerd worden door een tegengesteld veld op te wekken door een stroom te laten lopen in een grote spoel die rond het schip geplaatst wordt. Maar een schip heeft ook een geinduceerd magnetisme. Het geïnduceerd magnetisme is eigenlijk de verstoring van het magnetisch veld van de aarde door het metaal in het schip. Het geïnduceerd magnetisme hangt af van het plaatselijk aards magnetisme en kan niet gecorrigeerd worden met een constante stroom. Een magnetometer was toen veel te complex om op een schip gebruikt te worden, men moest zich dus behelpen met kaarten die het aards magnetisme aangaven, zowel in verticale als in horizontale richting (hoofdveld en zijveld). Men moest ook een kaart hebben die het verschil aangaf tussen het magnetisch noorden en het ware noorden (declinatie). Deze drie gegevens werden manueel op het degaussingpaneel ingegeven. De parameters waren geldig voor een groot gebied op zee, zodat de instellingen slechts om de zoveel dagen gecontroleerd moesten worden. Het zijveld heeft natuurlijk een ander invloed op het schip als die in noordelijke of westelijke richting vaart: de correctie moet via andere spoelen gebeuren (het hoofdveld blijft hier constant). Het signaal van de gyrocompas moet dus ook ingevoerd worden. Maar een schip blijft niet stabiel op zee: het slingert en het stampt. Deze informatie moet ook in de degaussinginstallatie ingevoerd worden: deze correctie is in feite even belangrijk als de compaskoers.
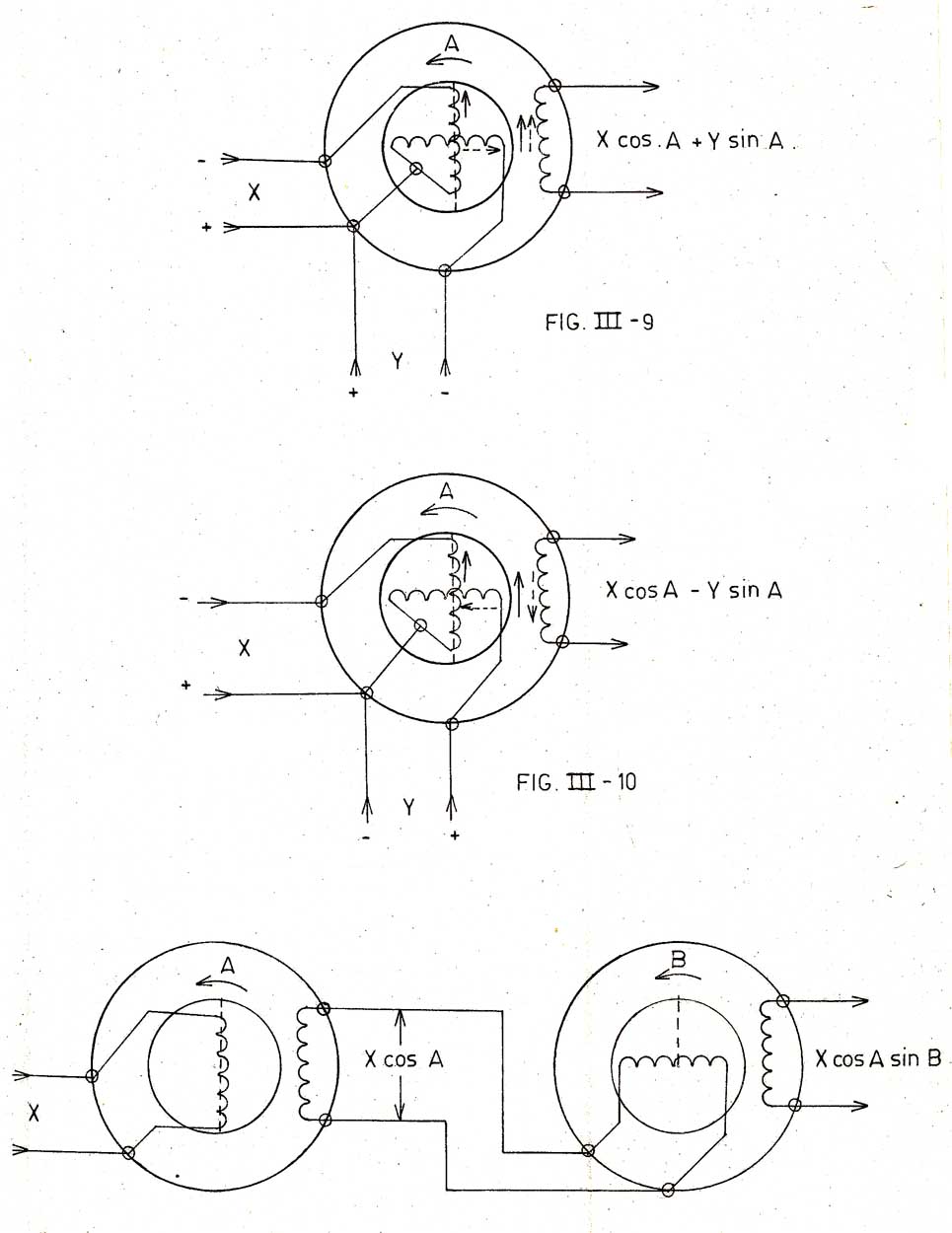
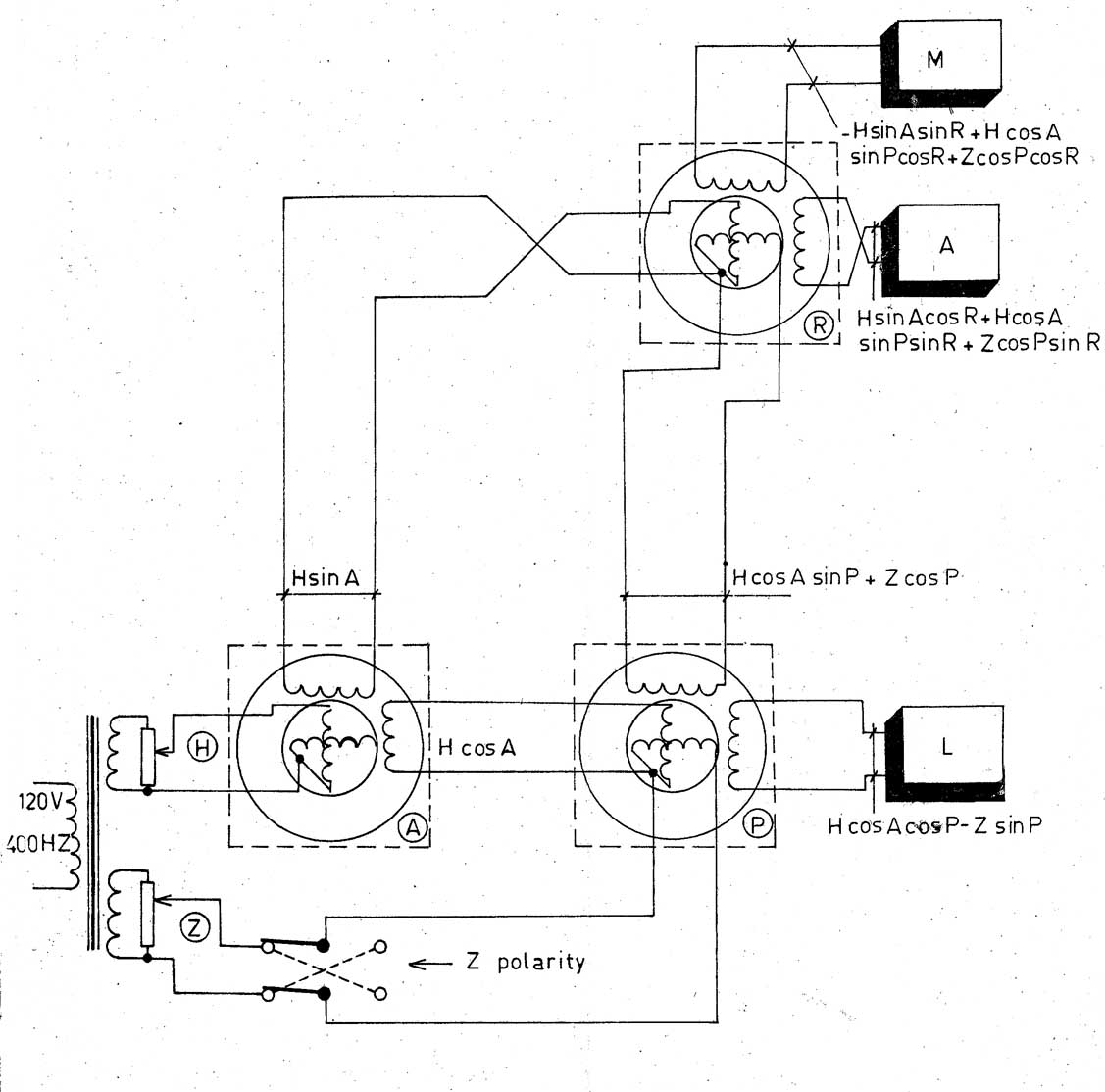
De rsolver is in feite een regelbare transformator, daarom dat die met wisselspanning gevoed moet worden (meestal is dat 400Hz zodat er een snellere regeling mogelijk is en de resolver ook kleiner gemaakt kan worden). Transformatoren werken namelijk enkel met wisselspanning. Dankzij het gebruik van een transformator (met gescheiden secundaire wikkelingen) heeft men extra mogelijkheden: het uitgangssignaal is zwevend zodat men heel gemakkelijk signalen bij elkaar kan optellen of aftrekken (de secundaire wikkelingen van twee regelbare transformatoren worden in serie gezet). Vermenigvuldigen is ook mogelijk door twee rekensynchros achter elkaar te schakelen. De rotor kan verdraaid worden (manueel of via een selsyn) en het uitgangssignaal is de sinus of de cosinus van de hoekverdraaing. Een selsyn is een combinatie transmittersynchro en ontvangersynchro die een mechanische hoekstand electrisch doorstuurt. Voor onze degaussinginstallatie hebben we volgende inputs nodig:
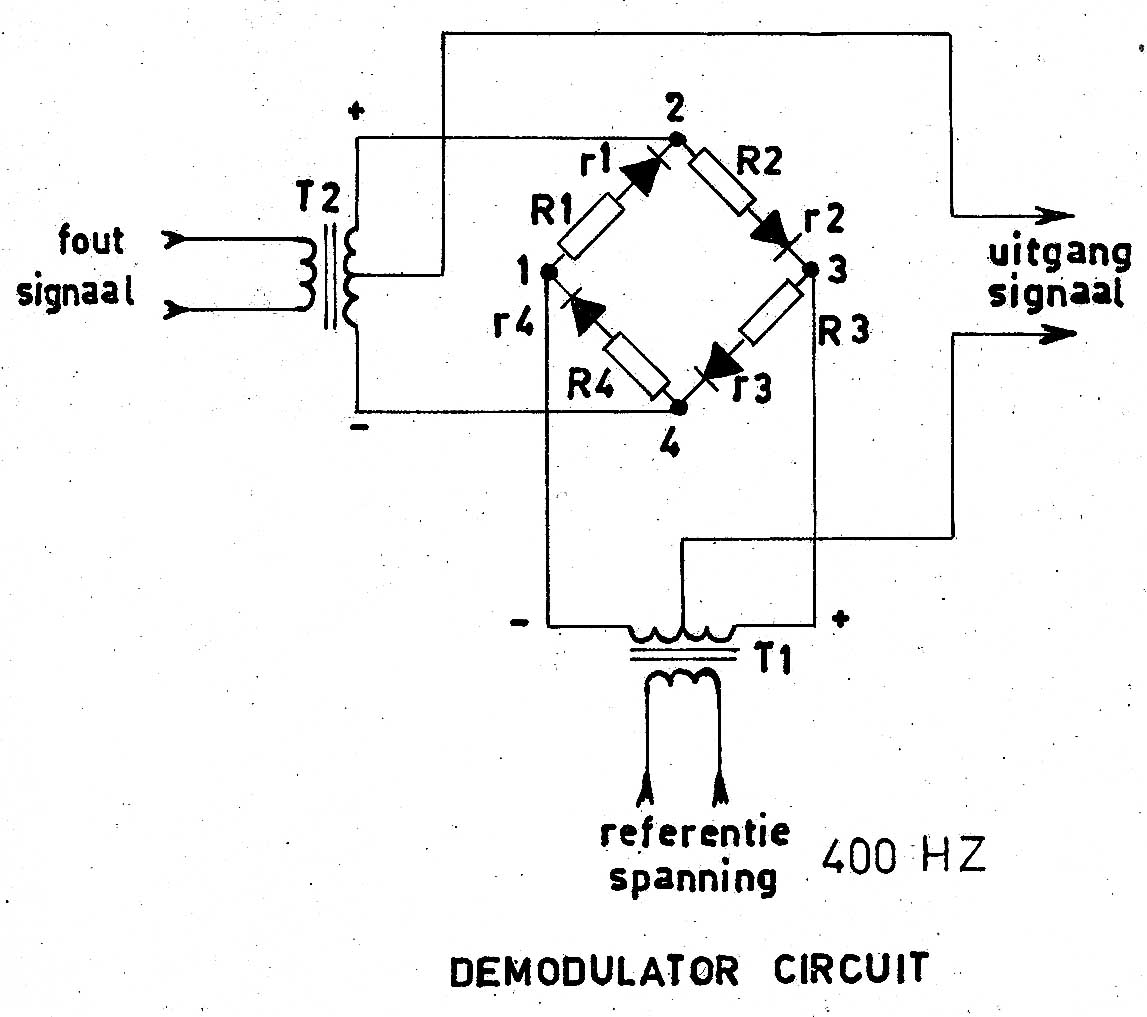
De output van onze "rekenmachine" zijn de drie correctiestromen die naar de drie spoelen gestuurd worden: de hoofdspoel (horizontaal opgesteld) die het vertikaal magnetisme corrigeert, de A-spoel (in de lengte-richting geplaatst) en de L-spoel (dwars geplaatst). Alles wordt mooi berekend en het uiteindelijk signaal wordt naar de spoelen in het schip gestuurd. Maar zover zijn we nog niet! We hebben ten eerste te maken met wisselspanning, noodzakelijk om de roterende transformatoren te voeden. De informatie zit in de fase van het signaal (positief of negatief uitgangssignaal) en in de amplitude: daarom heeft men een detector nodig die gesynchroniseerd is met de referentiespanning waarmee de rekensynchros gevoed worden. Men gebruikt hiervoor een synchrone demodulator. Een andere naam is ring demodulator (vanwege het feit dat de diodes een ring vormen). Onze demodulator geeft een zeer zwakke stroom af, hoogstens een paar milliampères, terwijl men meerdere ampères nodig heeft om het schip te beveiligen. Electronische versterkers (met buizen) waren toen niet in staat om zulke hoge stromen te leveren. Om het signaal te versterken zal men eerst een magnetische versterker gebruiken, gevolgd door een amplidyne (een speciale dynamo die gebouwd is om de signalen verder te versterken). Voor mijnenvegers die in de binnenwateren gebruikt worden volstaat deze installatie niet (MSI: Mine Sweeper Inshore). Het lokaal magnetisch veld kan sterk afwijken ten gevolge van kaaien, bruggen en andere metalen constructies zodat men hier een echte magnetometer moet gebruiken. Door het gebruik van de magnetometer vervallen alle rekensynchros: de magnetometer meet immers het effektief magnetisch veld en houdt rekening met het slingeren en stampen van het schip. Hier gebruikt men nog altijd drie amplidynes om de degaussingspoelen te voeden. In een volgende uitvoering zal men rekening houden met het feit dat het schip geen homogeen geheel is: lokale lussen worden rond zware motoren en grote metalen stukken geplaatst (ankel en lier, stroomgroep,...). Ook de magnetische mijnen werden immers gevoeliger, waardoor de immunisatie van het schip nauwkeuriger moest gebeuren. En tegenwoordig (dus vanaf de jaren 80...) gebruikt men schepen met aktieve roeren (roeren waarop een electromotor geplaatst wordt). Deze motoren moeten natuurlijk ook gecompenseerd worden, maar men kan hier niet meer het magnetometersignaal gebruiken, want de roeren kunnen onafhankelijk draaien. Men moet dus opnieuw de hoekpositie van de roeren inlezen (inderdaad: met een resolver) en het signaal aan een computer doorgeven. Men gebruikt hier echter een digitale computer en geen rekensynchros meer. |
Publicités - Reklame