-
|
We hebben het zendgedeelte en het ontvangstgedeelte van de radar besproken. Nu moeten we nog de gegevens op het scherm kunnen presenteren.
Plan Position IndicatorTegenwoordig gebruikt men een PPI indicator waarbij een hindernis dichtbij het schip een blip dicht bij het centrum van het scherm geeft, terwijl een veraf gelegen hindernis een blip aan de omtrek van het scherm geeft. Vroeger gebruikte men een fosforlaag met lange persistentie, zodat het beeld bij iedere omwenteling van de radarantenne versterkt werd. Zo kan men de storingen beter onderdrukken (golftoppen) die zich verplaatsen tussen twee antenne omwentelingen.Bij de eerste radars met PPI plaatste men een resolver op de as van de antenne. De resolver levert twee signalen die na versterking naar de de X en Y afbuigplaten van de oscilloscoop gestuurd kunnen worden.
Het is altijd de zwaardere antenne die de motor van de deflectiespoel stuurt en niet het omgekeerde. In het voorbeeld doet de antenne een volledige omwenteling om de 3 seconden. Het C signaal is het signaal dat naar de modulator gestuurd wordt om de magnetron kortstondig in te schakelen en eventueel ook om de TR switches te doen werken. De pulstijd bedraagt hier 0.5µs en de herhalingsfrekwentie (PRF: pulse repetition frequency) is 800µs of 1250Hz. Het D signaal is een zaagtandsignaal die voor de afbuiging van de electronenstraal dient. Het signaal is vergelijkbaar met het zaagtandsignaal van een oscilloscoop, maar de afbuiging is in permanente rotatie. In tegenstelling met een oscilloscoop is er geen verticale afbuiging maar een Z-modulatie (helderheidsmodulatie van de spot). Dit is de reden dat het baseband signaal videosignaal genoemd wordt. In ons voorbeeld, met een pulsherhalingsduur van 800µs bedraagt de herhalingsfrekwentie 1250Hz. Het E signaal is het videosignaal dat naar de wehnelt gestuurd wordt om de lichtstip in helderheid te moduleren. Tijdens de werking van de magnetron is de ontvanger volledig geblokkeerd, dit is nodig om de verzadiging van de versterkertrappen te vermijden. Dit is de dip in de curve tijdens en juist na de uitzending. Tijdens de ontvangstfase toont het scherm de ontvangen echo's. Een echo dat snel ontvangen wordt is afkomstig van een nabijgelegen doel. Zwakke echo's zijn niet zichtbaar, ze zitten in de ruis. Het signaal dat hier getoond wordt is een gecorrigeerd signaal (STC en constante ruisniveau). Dit maakt het mogelijk een aanvaardbaar beeld te hebben, zelfs in ongustige omstandigheden (felle regen) Men is overgestapt van een draaiende afbuigspoel naar een meer klassike afbuiging met horizontale en verticale spoelen zoals in een televisie. De boegpuls dient om een oscillator te synchroniseren die een sinus en een cosinus produceren (signalen die 90° in fase verschoven zijn). Met deze signalen kan men de spot rondjes laten tekenen op het scherm. De sinus en cosinus worden vermenigvuldigd met het zaagtandsignaal (afbuiging ten opzichte van het midden van het scherm). We hebben een spot die volgende bewegingen aflegt:
Redelijk snel na het gebruik van X en Y afbuigspoelen is men digitale schermen gaan gebruiken (computerschermen). Ieder punt van het scherm (er zijn bijvoorbeeld 1000 × 1000 punten) is verbonden met een geheugencel (byte in het werkgeheugen). Er was dus een werkgeheugen nodig van minstens 1MB. De processor berekent welk punt geschreven moet worden (gebaseerd op de sinus, cosinus en zaagtandspanning). De waarde van die geheugenplaats wordt verhoogd met een waarde van het gedigitaliseerd videosignaal op dit ogenblik. Bij iedere omwenteling van de antenne wordt de waarde verhoogd, zodat men een heldere spot krijgt na een paar omwentelingen. Echo's die niet voldoende stabiel blijven (vogels, golven) kunnen zo gemakkelijk onderdrukt worden. Het geheugen wordt lijn per lijn uitgelezen (zoals een computermonitor) en produceert een punt dat min of meer zichtbaar is naargelang de waarde van het geheugen. Na de leesopdracht wordt de waarde verminderd: dit komt overeen met de fosforpersistentie. Hier kan men de persistentie softwarematig wijzigen. De signaalbewerking door middel van een computer maakt het mogelijk het beeld aan te passen aan de omstandigheden, met een betere onderdrukking van ruissignalen, enz. De versterking kan zelfs lokaal aangepast worden zodat de gevoeligheid constant blijft, zelfs in een buienzone. Het is mogelijk een spoort te trekken zodat men de beweging van andere schepen kan zien. De computer kan ook de positie van schepen berekenen en een alarm geven als een ander schip binnen de veiligheidszone zou komen. Later is de beeldbuis vervangen door een LCD of OLEd scherm, maar het principe is hetzelfde gebleven.
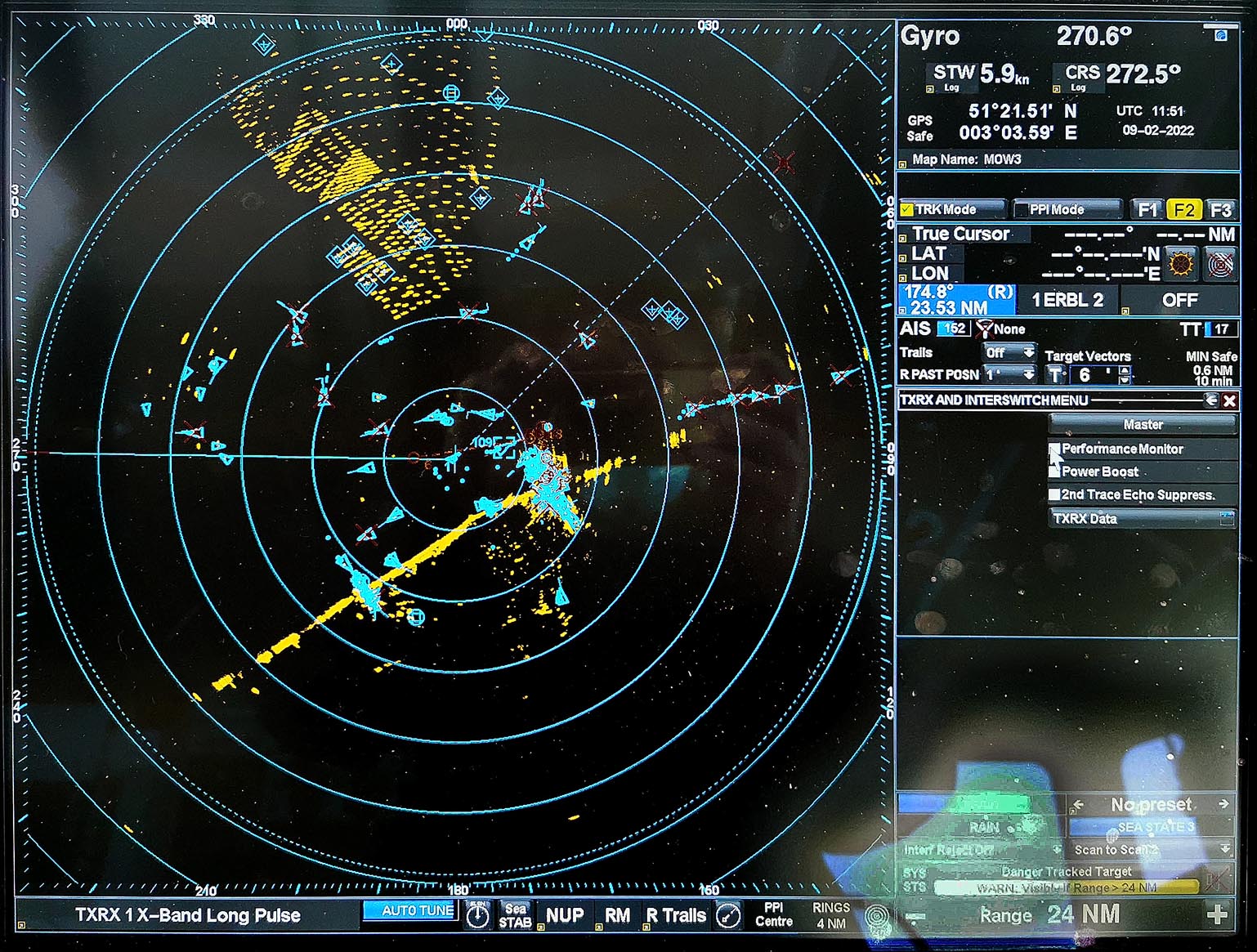
De radar wordt ook gekoppeld aan de AIS, dit is de burgerlijke versie van de identification friend or foe. Alle schepen moeten om de zoveel seconden hun positie doorgeven op een vastgelegde frekwentie op de VHF band. Deze informatie wordt door de schepen in de omgeving ontvangen en op het radarscherm getoont. Radarbeeld op zee ter hoogte van Zeebrugge. De belgische kust en de windmolens zijn goed zichtbaar in het geel. De cyan driehoeken zijn schepen die gedetecteerd zijn door het AIS (automatic identification system). |
Publicités - Reklame