-
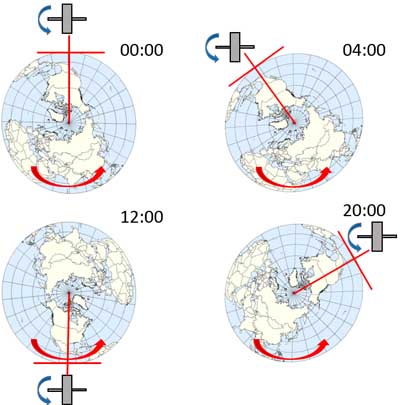
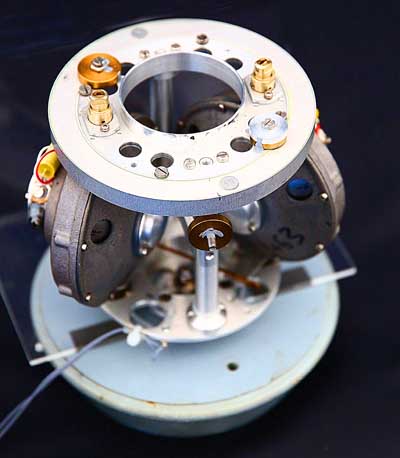
GyrocompasEen gyrocompas bestaat uit een gyroscoop die opgehangen is in een cardanophanging, zodat de gyroscoop vrij kan draaien ten opzichte van de behuizing. Er kan heelwat energie opgeslagen worden in een gyroscoop: met de opgeslagen cinetische energie in een reuze gyroscoop heeft men zelfs bussen laten rijden !De gyroscoop is een tol die heel snel draait (3.000 tot 24.000 toeren per minuut naargelang het model) en door de traagheid heeft de gyroscoop de neiging om altijd in dezelfde richting te draaien (rotatieas). Een werkende gyroscoop wijst altijd naar dezelfde richting (bijvoorbeeld een bepaalde ster). Ten opzichte van de aarde wijst de gyroscoop naar dezelfde richting éénmaal per 24 uur. Hoewel de gyroscoop altijd naar dezelfde richting wijst, is dit niet noordzakelijk het noorden. De uitleg die hier gegeven wordt heeft betrekking op de eerste gyrocompassen. Meer technische informatie is te vinden op deze pagina: werking van een moderne gyrocompas. We moeten hier een kleine ingreep uitvoeren om van de gyroscoop een gyrocompas te maken. We dwingen de volledige gyroscoop in één richting door een klein gewichtje onderaan de cardanas te plaatsen. De gyroscoop is nu horizontaal gestabiliseerd, zijn rotatieas kan enkel naar een punt aan de horizon wijzen. Indien ten gevolge van schokken of slingeringen de rotatieas niet horizontaal wijst, zal die door het gewichtje langzamerhand horizontaal getrokken worden. Een vrijheidsgraad is dus weggenomen. De beweging is beperkt, zoals die van een magnetisch compas. Een gyroscoop heeft een zeer hoge traagheid en heeft de neiging altijd naar eenzelfde punt te richten. Door de rotatie van de aarde wordt de tol echter verplicht zich te verdraaien. Door zich naar het noorden (of zuiden) te richten moet de tol zich niet meer verdraaien: de tol richt zich automatisch naar het noorden of zuiden. We leggen de werking nu verder uit voor een gyrocompas die aan de evenaar werkt. Als de rotatieas van de gyroscoop en de rotatieas van de aarde in eenzelfde richting wijzen, dan is het systeem stabiel. Als de rotatieas van de gyroscoop echter naar een andere richting wijst, bijvoorbeeld het westen of het oosten, dan zal de gyroscoop altijd naar dezelfde richting willen wijzen, ongeacht de rotatie van de aarde. De gyroscoop probeert het horizontaal vlak te doen kantelen, maar krijgt tegenkanting van het gewichtje. De enige manier om het gewichtje niet te doen stijgen, is door zijn rotatieas te richten op die van de aarde. Verder van de evenaar zijn er twee krachten in het spel: de gyroscoopwerking die de rotatieas evenwijdig met de rotatieas van de aardfe probeert te houden, en het gewichtje, die de gyroscoop dwingt een horizontale rotatieas aan te nemen. In de praktijk wijst de gyrocompas naar het geografisch noorden. Ik heb het woord precessie bewust niet gebruikt. Het woord is wel juist, maar de uitleg die bij precessie gegeven wordt is moeilijk te begrijpen (precessie is verantwoordelijk voor de corioliskrachten, maar ook voor de eigenschappen van elementaire deeltjes (die ook een spin blijken te hebben)). De gyrocompas geeft een druk die veel sterker is dan die van een magnetisch compas, maar die is toch onvoldoende om de repeaters te sturen. De druk van het gyrocompas wordt versterkt en doorgegeven aan een buitenkader (fantom) die meedraait en de kabels naar het gyrocompas vloeiend leidt. Zo ontstaan er geen parasitaire krachten die de meting zouden kunnen vervalsen. Een gyrocompas is volkomen ongevoelig voor het scheepsmagnetisme, declinatie en inclinatiefouten en heeft een fout die lager dan 1° is. Maar een gyrocompas heeft uren nodig om zich te stabiliseren na de opstart. Plotse richtingwijzigingen en snelheidsveranderingen kunnen het gyrocompas volkomen in de war sturen (daarom wordt een gyroscompas niet in die vorm op vliegtuigen gebruikt). Het is een mechanisch precisieinstrument die regelmatig nagezien moet worden. Een gyrocompas heeft uren nodig om zich te stabiliseren na een stroomonderbreking, daarom dat sommige toestellen uitgerust zijn met een electronisch magnetisch compas, die misschien minder nauwkeurig is, maar toch een aanwijzing kan geven terwijl de gyrocompas zich naar het noorden richt. Zoals het magnetisch compas wordt de werking van het gyrocompas minder nauwkeurig bij de polen. In de nabijheid van de noord- of zuidpool (rotatieas van de aarde) wijst de gyrocompas permanent naar eenzelfde punt aan de hemel. De gyrocompas draait dus niet mee met de rotatie van de aarde: gezien vanaf de aarde "draait" het compas mee met de sterren. Bij breedtegraden boven de 70 heeft het gyrocompas heel veel tijd nodig om de juiste richting aan te wijzen en is zijn werking niet meer betrouwbaar. de constructie van een gyrocompas worden hier in detail besproken.
Traagheidsnavigatie
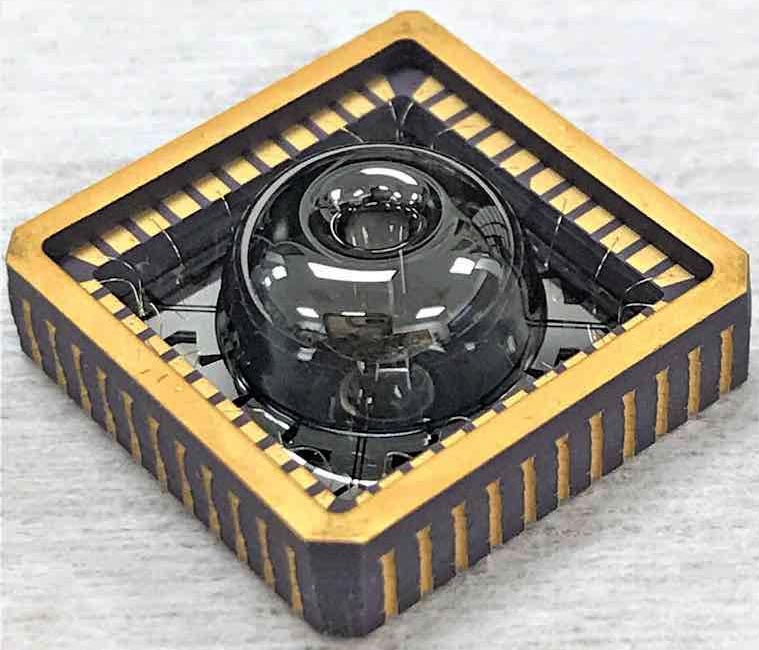
Vliegtuigen, raketten en onderzeeboten gebruiken traagheidsnavigatie die de absolute beweging van een onderwerp kan bepalen door naast de richting (koers) ook de versnelling te meten. Maar ook navigatiesystemen gebruiken een sensor om de positie te bepalen als het GPS signaal weggevallen is (in tunnels, tussen twee hoge gebouwen, enz). Je zal waarschijnlijk al opgemerkt hebben dat je navigator de weg blijft aangeven, zelfs al rij je in een tunnel.
|

Publicités - Reklame