-
|
Eerst moeten we kort uitleggen hoe een guroscoop werkt. Het is Léon Foucault (van de bekende slinger) die deze naam aan het instrument geeft in 1851. De naam van het instrument zegt wat de bedoeling ervan is: de draaing (van de aarde) zien (gyro-scoop). Foucault had reeds bewezen dat de aarde rond zijn as draaide door een lange slinger te gebruiken. De rotatie van de aarde werd aangetoond door de rotatie van de as van de slinger. Een tweede manier om de rotatie van de aarde te bewijzen is gebruik te maken van een gyroscoop. Door zijn hoge traagheid blijft de tol steeds naar dezelfde richting wijzen. In beide gevallen gebruikt men de traagheid om te bewijzen dat de aarde rond zijn as draait. De rotatie van de aarde is nauwelijks meetbaar. Toen was het nog niet mogelijk een gyroscoop met motor te bouwen: de meting moest uitgevoerd terwijl dat de tol aan het draaien was (hoogstens een paar minuten). Om de verdraaing van de as te observeren werd er een spiegeltje op de cardan gemonteerd en werd er een fijne lichtstraal op geprojecteerd.
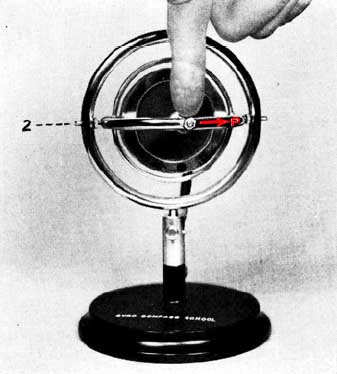
Eigenschappen van een gyroscoopDoor rotatietraagheid (inertie) lijkt de massa van de tol veel groter dan in werkelijkheid. Dankzij de rotatietraagheid valt een fiets niet om als die in beweging is. Vuurwapens hebben een loop met groeven om een draaiende beweging aan de kogels te geven. Door de draaiende beweging volft de kogel beter zijn baan en wordt die minder afgebogen door bijvoorbeeld de wind. Het is ook dankzij de rotatietraagheid dat een draaiende gyroscoop steeds naar dezelfde richting wijst. Zonder rotatie zou de friktie op de cardans ervoor zorgen dat de tol mee beweegt met de uitwendige bewegingen. De precessie is ook een vorm van traagheid. Als men op de horizontale cardan drukt (zie tweede afbeelding), dan zal de cardan niet meegeven, maar kantelen rond zijn verticale cardan. 
De uitleg wordt door de afbeelding hierboven gegeven. We hebben een gyroscoop die van boven gezien is. De gyroscoop draait in wijzerszin (R). Als we op punt F dfrukken, dan dwingen we de tol te kantelen volgens de as X-X'. Een molecuul die op A gelegen is, heeft de neiging naar rechts te bewegen (door de traagheid), maar wordt ook naar beneden afgebogen door de druk op F. Een molecuul op punt C heeft de neiging naar links en naar boven te bewegen. Het resultaat is dat de gyroscoop volgens de as Y-Y' beweegt, met de rechterkant naar beneden en de linkerkant naar boven. De deeltjes op punt B en D worden niet beïnvloed door de druk op punt F. Maar ze worden wel beïnvloed door het kantelen volgens de as Y-Y'. Een deeltje op punt B heeft de neiging naar beneden te gaan en een deeltje op punt D heeft de neiging om naar boven te gaan. In een perfekte gyroscoop zonder verliezen wordt de druk op F volledig gecompenseerd door de tegendruk. het resultaat van de druk is het kantelen van de gyroscoop langs een as die 90° verder gelegen is in de draairichting van de tol.
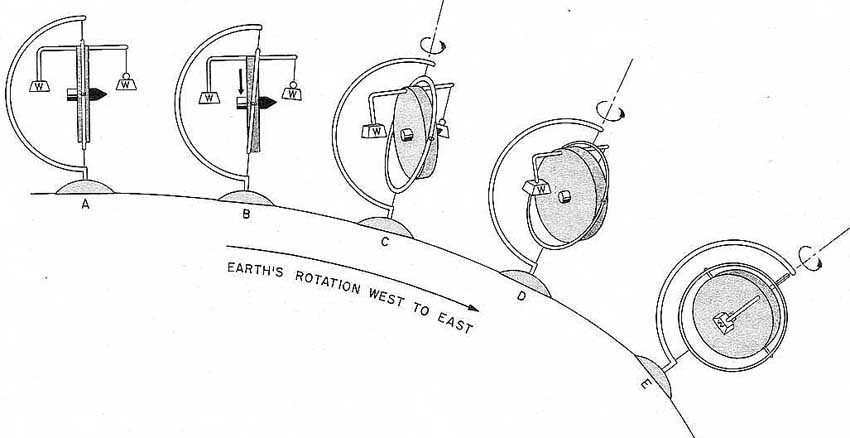
Bouw van een gyrocompasDe eerste gyroscopen waren uitgerust met een gewichtje om het horizontaal vlak te maken (zie de inleiding over scheepscompassen), maar dit had als nadeel dat de gyroscoop niet meer perfekt symmetrisch is. Het rollen en stampen van het schip, maar ook de versnelling en het draaien van het schip verstoren de werking van het gyrocompas. De eerste toestellen waren uitgerust met een tweede gyroscoop die als funktie had de eerste te stabiliseren. Om van een gyroscoop een gyrocompas te maken voegt men een dubbele kwikreservoir toe (met elkaar verbonden door een fijne buis). In rust is het systeem perfekt stabiel (volledig symmetrisch). In een echte gyroscoop gebruikt men zelfs 4 reservoirs aan de vier hoekeinden van de tol om een symmetrische constructie te bekomen. De volgende figuur toont ons een gyroscoop die op de evenaar geplaatst is, gezien vanaf de zuidpool. De aarde draait van het westen naar het oosten. Aangezien de aarde rond zijn as draait, heeft één as de neiging zich te richten ten gevolge van de traagheid. |

| Omdat de gyroscoop meer en meer naar boven wijst, loopt er een deel van het kwik naar het reservoir aangeduid door de pijl. Het niveau blijft immers horizontaal, maar de as kantelt door de draaing van de aarde. De grotere hoeveelheid kwik in één van de reservoirs oeffent een druk uit, waardoor er precessie optreedt: de as daalt niet, maar de gyroscoop richt zich naar het noorden. Tegenwoordig gebruikt men ook olie in plaats van kwik. |
|
Een ander systeem gebruikt twee gewichten, de ene vast en de andere aan een slinger (zie voorbeeld). Als de gyroscoop kantelt, dan zal het gewicht niet meer loodrecht inwerken maar schuin, waardoor er een verschil in neerwaartse druk optreedt. De gyroscoop ontvangt dus een druk die de precessie doet ontstaan. In de praktijk gebruikt men twee gewichten, één vast en één die kan kantelen.
Zo'n gyrocompas heeft een betere demping nodig en men zal vaak een tweede gyroscoop gebruiken die enkel voor de stabilisatie dient (niet noordzoekend). Men gebruikt de naam ballistic voor het richtsysteem (ballistic: onderhevig aan de zwaartekracht)
Een gyrocompas die zijn beweging voltooid heeft blijft verder in beweging, want het niveau is nog niet in evenwicht als het compas het noorden wijst. Het compas voert een aantal slingeringen uit vooraleer zich te stabiliseren. Na een opstart duurt het enkele uren vooraleer de gyrocompas stabiel werkt. Een gyrocompas bevat nog andere onderdelen naast de kwikreservoirs. Dit zijn onderdelen die een correcte en stabiele werking garanderen. 3 onderdelen zijn van groot belang (hoe een gyrocompas gemaakt is staat hier).
1- Demping van de oscillaties
2- Koppelversterking
3- Correctie van de bewegingen van het schip Ook de beweging van het schip moet gecompenseerd worden. Veronderstel een schip die naar het noorden vaart (volgens de lijn AB). Deze beweging wordt opgeteld bij de rotatie van de aarde (lijn AC). Het resultaat is een effektieve beweging AD, en de gyrocompas zal zich niet naar het noorden richten, maar volgens een lijn EF waarvan de declinatie afhangt van de snelheid van het schip en de positie ten opzichte van de evenaar. |
 De volledige gyroscoop zit in een frame die horizontaal kan draaien. De horizontale positie van de tol wordt doorgegeven door microschakelaars of naderingssensoren om de buitenkader te richten volgens de horizontale positie van de tol. Het doel is het zwakke moment (koppel) te versterken. Het koppel van een gyrocompas is hoger dan die van een magnetisch compas, maar door de versterking kunnen er gemakkelijk repeaters aangestuurd worden. De buitenkader die de draaiing van het compas volgt beperkt de frictie en tractie van de voedingskabels van de tol (aandrijving van de motor).
De volledige gyroscoop zit in een frame die horizontaal kan draaien. De horizontale positie van de tol wordt doorgegeven door microschakelaars of naderingssensoren om de buitenkader te richten volgens de horizontale positie van de tol. Het doel is het zwakke moment (koppel) te versterken. Het koppel van een gyrocompas is hoger dan die van een magnetisch compas, maar door de versterking kunnen er gemakkelijk repeaters aangestuurd worden. De buitenkader die de draaiing van het compas volgt beperkt de frictie en tractie van de voedingskabels van de tol (aandrijving van de motor).
Publicités - Reklame