-
Voor we te maken hadden met een gyrocompas (die het noorden aanwijst) heeft men een tijdje met de gyroscoop gewerkt. De gyroscoop wijst altijd naar eenzelfde richting en moet eerst gericht en opgestart worden. De franse onderzeeboot Gymnote (1888) gebruikte voor het eerst zo'n gyroscoop (een magnetisch compas kan niet in een metalen schip gebruikt worden). Gyroscopen worden tegenwoordig nog steeds gebruikt in vliegtuigen, waarbij ze bijvoorbeeld het kunstmatige horizon aangeven. Militaire vliegtuigen die scherpe bochten kunnen maken kunnen niet uitgerust worden met een gyrocompas die de snelle bewegingen niet kan verwerken. Als men de geschiedenis van de gyroscoop leest komen twee namen naar voren: :
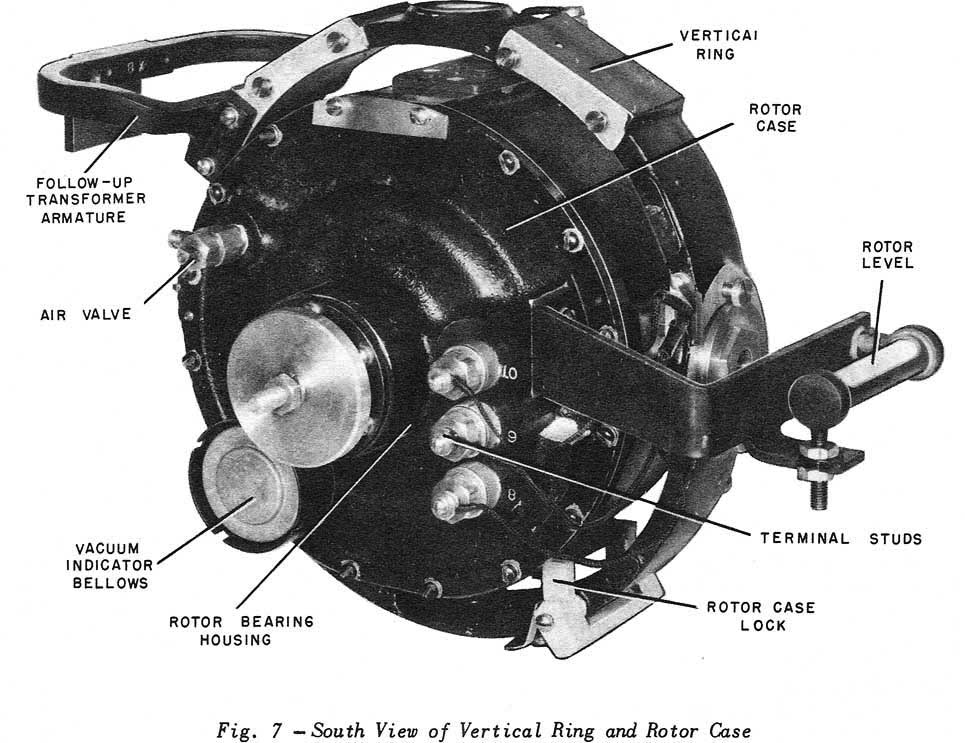
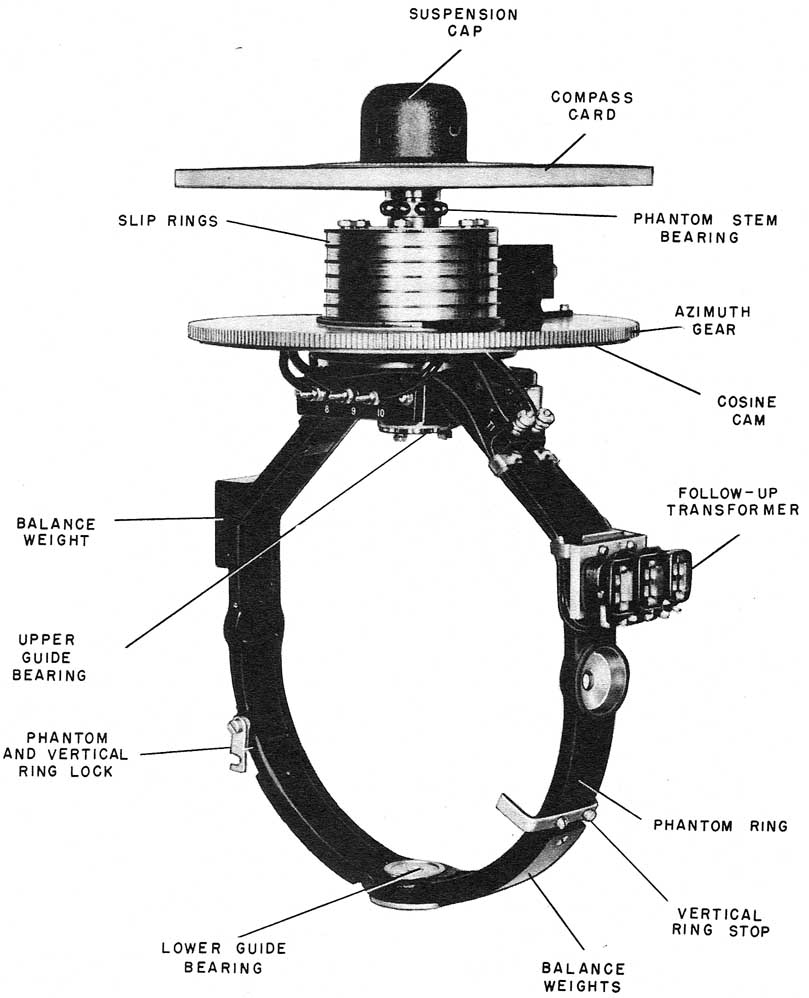
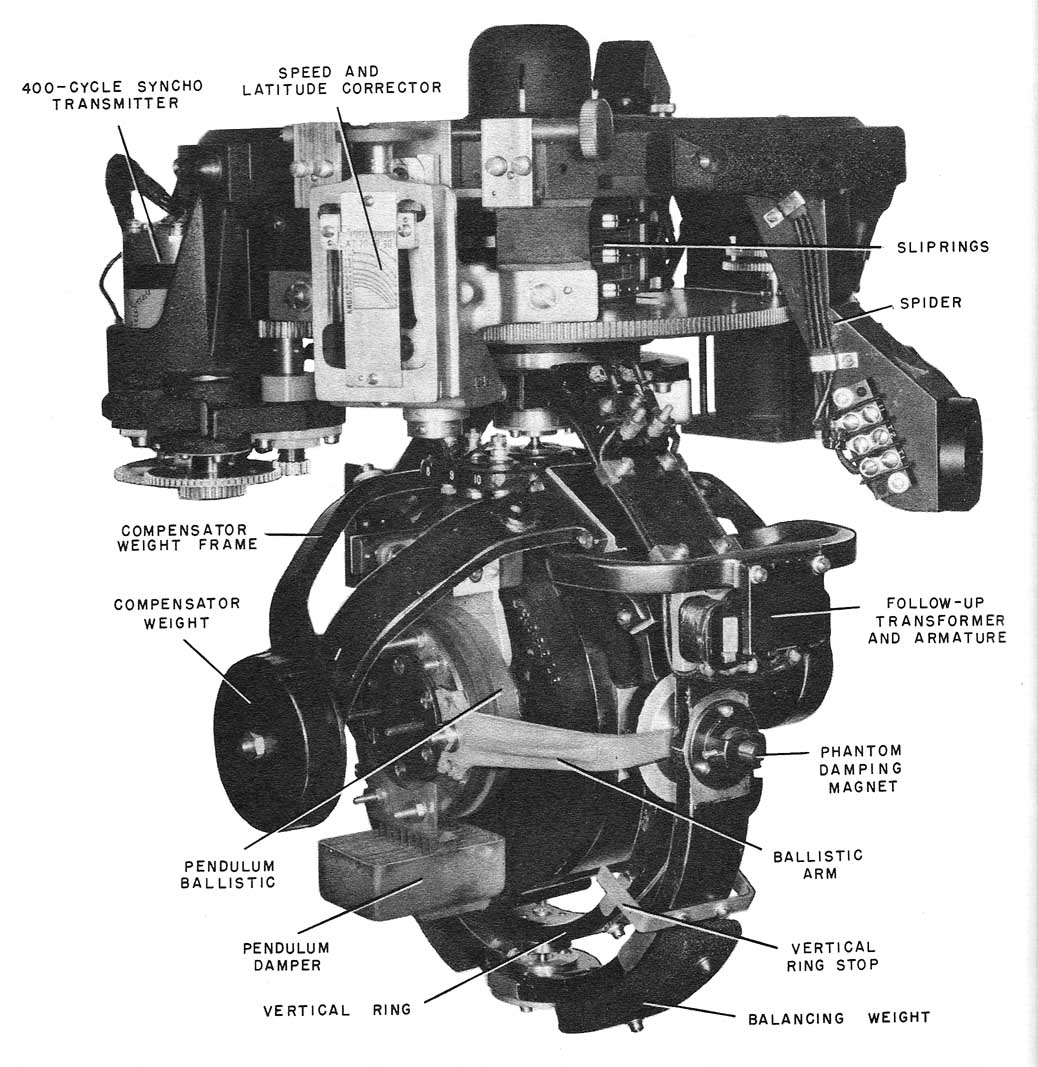
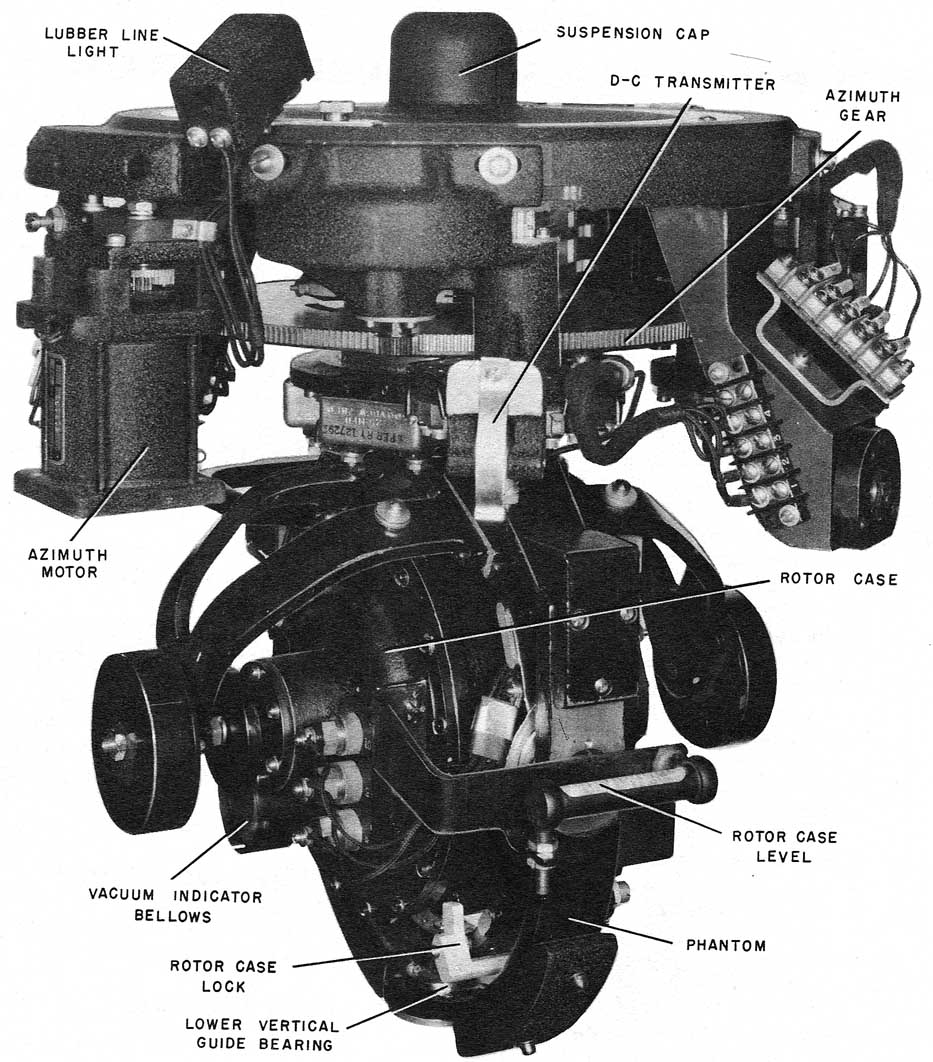
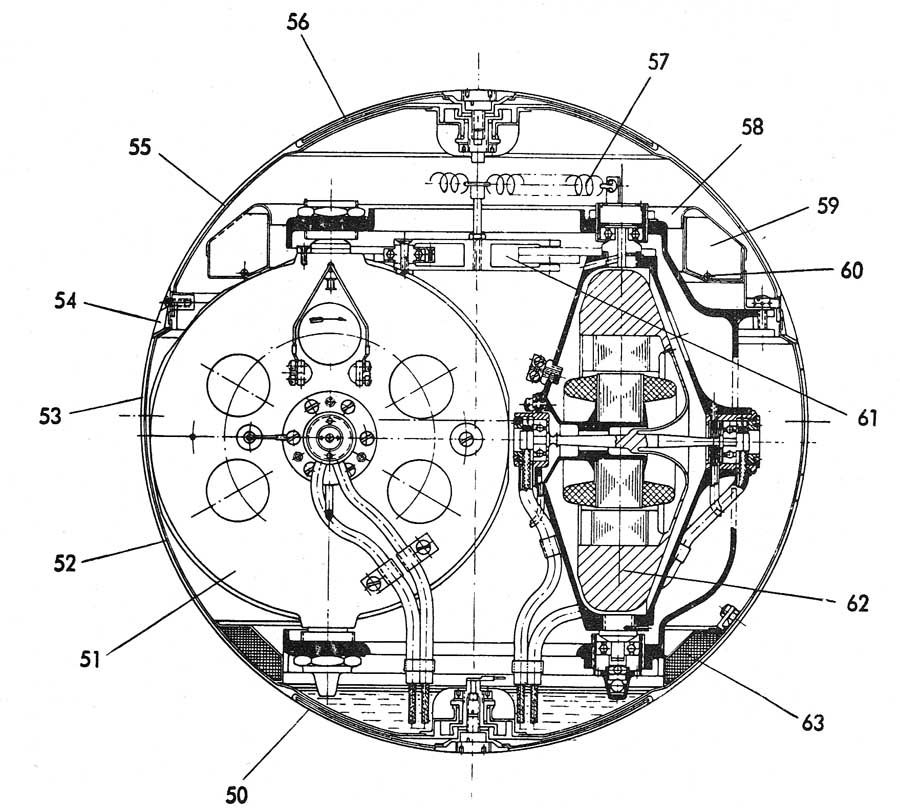
En de Engelsen in dit verhaal? De Engelsen kunnen zeker een gyrocompas gebruiken, nu dat de schepen meer en meer gebruik maken van metaal (zeker de militaire schepen), waardoor het magnetisch compas letterlijk het noorden kwijt is. Maar door lobbywerk van een engelse fabrikant van magnetische compassen wordt de gyrocompas slechts laat in gebruik genomen bij de Navy. Het gyrocompas moet gevoed worden door een stabiele stroom. De voeding mag niet onderbroken worden, want een gyrocompas heeft uren nodig om zich juist in te stellen na het opstarten. Daarom ook dat alle schepen uitgerust moeten zijn met een magnetisch compas, die misschien niet zo nauwkeurig is, maar wel blijft werken als er geen voeding is. De meeste gyrocompassen worden gevoed met de 24V boordspanning. Het belangrijkste onderdeel van de gyrocompas is natuurlijk de gyroscoop of gyrotol. Dit deel draait op zeer hoge snelheid. De motor is een asynchrone driefasige motor waarvan de frekwentie 400Hz bedraagt (in plaats van 50 of 60Hz). Dit is de enige manier om een asynchrone motor snel genoeg te laten draaien. Het richten van de gyroscoop ten gevolge van de precessie mag niet afgeremd worden, zelfs niet door de voedingskabels van de gyrotol motor. De eerste afbeelding toont ons de gyroscoop. Rechts boven ziet men het anker die samen met een speciale spoel gebruikt wordt in het servo systeem (volgsysteem, daarover later meer). Men ziet ook de drie klemmen van de driefasige tolmotor. De gyroscoop is omgeven door een ring die "phantom" genoemd wordt. Deze ring volgt exact de bewegingen van de gyroscoop, zodat de gyroscoop zelf niet belast wordt (de voedingskabels van de motor worden niet verbogen). De tweede afbeelding toont ons de ring, met bovenaan een windroos. Er zijn 6 electrische overbrengingen met sleepringen, drie voor de tolmotor en drie voor de volgtransfo. De volgmotor (servo motor) werkt in op het tandwiel. Het tandwiel drijft op zijn beurt de synchros aan (repeaters). De positie van het anker (op de tol) ten opzichte van de volgtransfo (op de ring) zorgt dat één van de wikkelingen van de transfo meer gesatureerd wordt dan de andere wikkeling. Het verschilsignaal wordt versterkt en stuurt de servomotor die ervoor gaat zorgen dat het volgend element (phantom) in dezelfde richting wijst als de gyroscoop. Het servosysteem moet niet enkel de draaing van de gyroscoop volgen, maar ook de draaing van het schip ten opzichte van de gyroscoop aangezien het gyrocompas op het schip gemonteerd staat. Het zijn natuurlijk de bewegingen van het schip die de grootste amplitude hebben. Beeld 3 en 4 tonen ons een volledige gyrocompas (het enige wat nog ontbreekt is de servoversterker en de behuizing). Het bovenste gedeelte is vast, terwijl het onderste gedeelte kan bewegen (gyroscoop met volgring). De gyroscoop kan vrij ronddraaien (azimuth) en stuurt de volgring waarop windroos en tandwiel gemonteerd zijn. Afbeelding 3: rechts de synchro die de positie van de windroos doorgeeft aan de repeaters. Deze gyrocompas gebruikt geen kwikreservoirs als richtsysteem, maar twee gewichten aan beide zijden van de gyroscoop. Het ene gewicht is vast gemonteerd op het as, het andere kan kantelen ten gevolge van de zwaartekracht. Het richtsysteem wordt ballistic genoemd (“element die beinvloed wordt door de zwaartekracht”). De richtransfo op de ring (follow up transformer) en het anker (armature) op de gyroscoop zijn goed zichtbaar. Afbeelding 4 (andere kant van het gyrocompas), rechts de servomotor en de verlichting van de windroos.
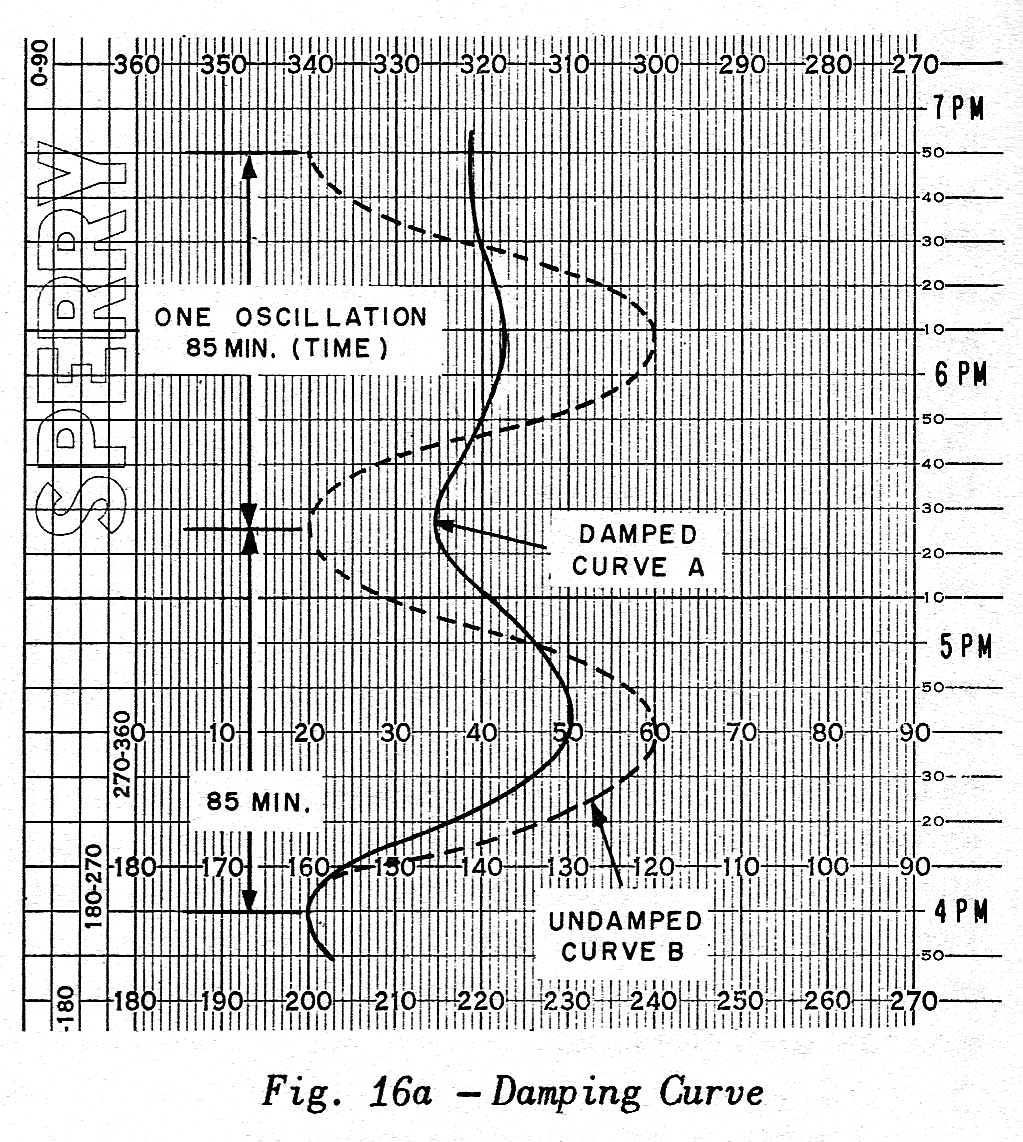
De gyroscoop met zijn hoge draaiende massa zal zich nooit stabiliseren als men geen dempingssysteem voorziet. Bij een ballistic met vloeistof wordt de demping veroorzaakt door het gebruik van zeer fijne buisjes. Vroeger werd er kwik gebruikt vanwege zijn hoge soortelijke gewicht, nu gebruikt men olie die viskeus is. In een gyrocompas met kantelgewicht als richtsysteem gebruikt men een tweede gyroscoop voor de demping (afbeelding 5). Deze tweede gyroscoop heeft geen richteffekt maar wordt enkel als dempend element gebruikt. Iedere fabrikant gebruikt een aantal elementen om zijn gyrocompas te bouwen. In het voorbeeld (afbeeldingen 1 tot 4) betreft het een gyroscoop met kantelgewicht als ballistic en waarvan de demping gerealiseerd wordt door een magneet (phantom damping magnet) en door gewichten (pendulum damper). Het dempen van de gyrocompas zodat die zo snel mogelijk de huiste richting aangeeft is een technisch probleem en de verschillende gyrocompassen verschillen voornamelijk in de manier hoe die demping praktisch uitgevoerd wordt. Men moet de storing veroorzaakt door het stampen, het slingeren en het draaien van het schip opvangen. Ten opzichte van de massa van de gyroscoop zijn dit echter snelle storingen die opgevangen worden door de traagheid van het systeem. Het gyrocompas heeft uren nodig om zich te stabiliseren na de inschakeling. Het effekt van de rotatie van de aarde is immers uiterst miniem ten opzichte van alle andere storende krachten, maar het is een kracht die continu blijft doorwerken. Door deze kracht over een lange tijd te integreren vervallen de andere (storende) krachten en blijft enkel de precessie over. Afbeelding 6 toont ons de stabilisatie van een gyrocompas na de inschakeling. Tegenwoordig kan men mechanische onderdelen nauwkeuriger maken, waardoor kleinere gyroscopen mogelijk zijn, die dus sneller reageren. De stabilisatie kan ook versneld worden door de gyrocompas eerst ruw te richten door middel van een magnetisch compas (fluxgate magnetometer). In bepaalde toepassingen wordt de gyrocompas vervangen door niet-mechanische systemen (laser gyrometers). Het zijn echter systemen die het noorden niet zoeken, maar deel moeten uitmaken van een systeem voor traagheidsnavigatie (inertial navigation system). Een laser gyrometer wordt gericht en zal dan een natuurlijke drift vertonen, gaande van 0.1°/h voor commerciële toepassingen tot 1m°/h voor nagigatiesystemen die in satellieten gebruikt wordt. |
Publicités - Reklame