| De stappenmotor is een synchrone motor, het stappen van de motor wordt gestuurd door de aangelegde spanningen. |
-
|
De reluctantiemotor is een verdere evolutie van de stappenmotor. De reluctantie is de magnetische weerstand. In machinaal vertaalde websites zal je de benaming "tegenzin motor" aantreffen, maar dit is een verkeerde vertaling! De correcte benaming is reluctantiemotor of motor met variabele magnetische weerstand.
De reluctantie is het omgekeerde van de magnetische permeabiliteit. Weekijzer heeft een hoge permeabiliteit, en dus een lage reluctantie terwijl lucht een lage permeabiliteit en een hoge reluctantie heeft. Een motor met variabele magnetische weerstand werkt volgens het principe van de electromagneet. De motor maakt deel uit van de familie van de synchrone motoren, motoren die aan een vaste netfrekwentie draaien, er is geen slip zoals bij de asynchrone motor.
De stappenmotor bestaat uit een rotor met een getande vorm bestaande uit een staalsoort die gemakkelijk magnetiseerbaar is. De rotor positioneert zich zodat de gemagnetiseerde polen de minste magnetische weerstand ondervinden (laagste reluctantie), op een manier dat de luchtspleet minimaal is. Het aantal polen van de rotor komt niet overeen met de statorpolen. Vaak zal men een verhouding van 6/8 aantreffen, maar motoren die driefasig aangestuurd worden gebruiken de combinatie 4/6. Door stroom door één van de spoelen te sturen (aangeduid als "C") draait de rotor zich zodanig dat de rotorpolen tegenover de statorpolen komen te staan: de rotor draait één stap in wijzerszin. Wordt de spoel "D" aangestuurd, dan zet de motor een stap in de andere richting. Rechts heb je de vorm van een motor met variabele reluctantie, laag vermogen en lage snelheid. Door de uitstekende polen wordt de rotor afgeremd door de luchtverplaatsing. Sneldraaiende motoren hebben een volle rotor, de niet-magnetische delen worden gevuld met epoxyhaars of een niet magnetisch metaal.
Stappenmotor of reluctantiemotor?Beide motoren zijn gebaseerd op hetzelfde principe en men zou dus beide benamingen door elkaar kunnen gebruiken.
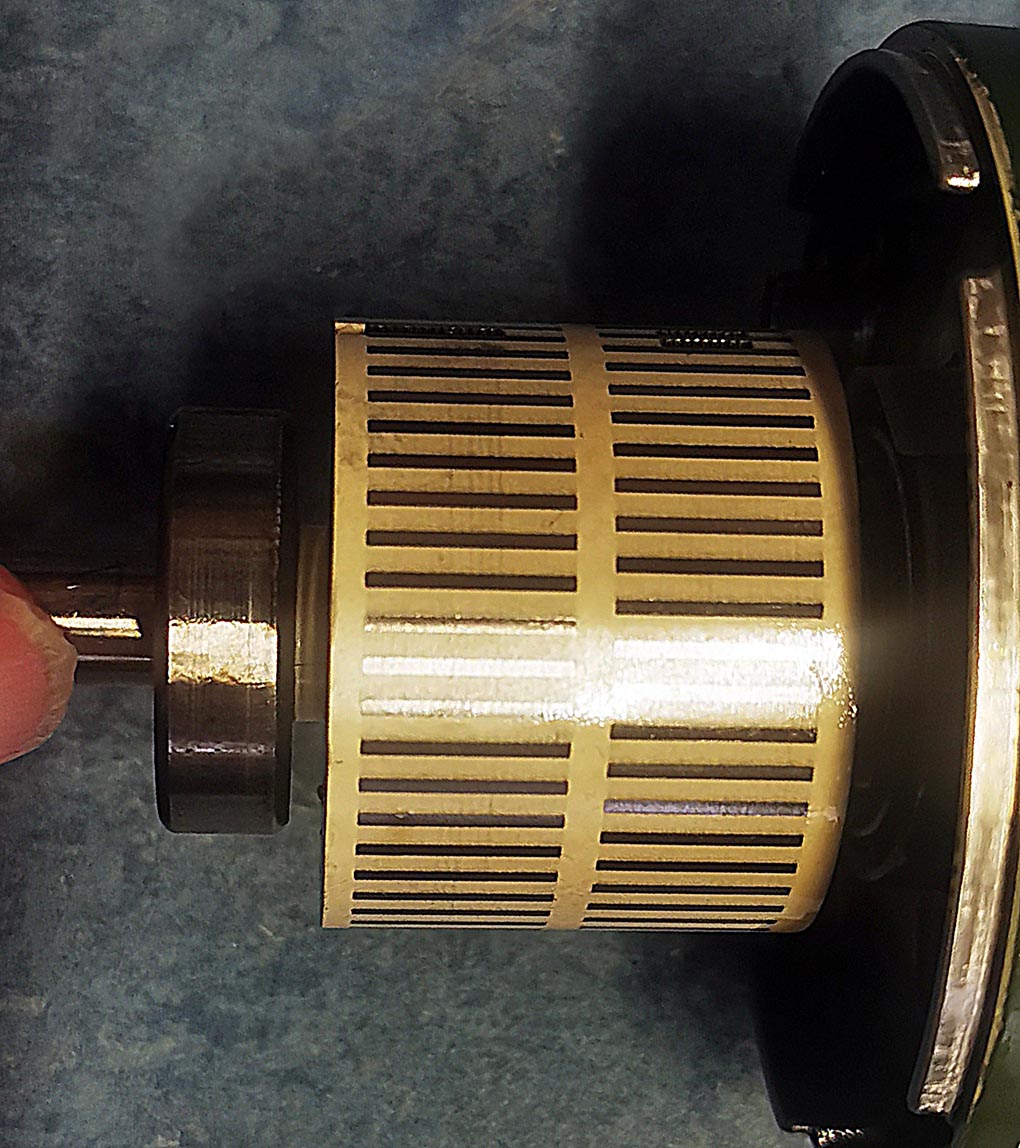
De motor echts wordt gebruikt in de motorsturing van een mijnenjager (chasseur de mines tripartite). De stappenmotor stuurt de woodward. De woodward vergelijkt het gevraagd motortoerental (aangegeven via de positie van de stappenmotor) met het effektief toerental (gemeten op de motor) en regelt de brandstoftoevoer om tot het gewenst motortoerental te komen. De rotor is uitgerust men kleine permanente magneten om de motor te blokkeren als er geen spanning aangelegd wordt. Dit om te vermijden dat de motorinstelling zou verlopen door de trillingen van de hoofdmotor. Het zijn zwakke magneten die geen invloed hebben als de stappenmotor aangestuurd wordt.
Stappenmotoren worden doorgaans electronisch aangestuurd. Deze motoren worden gebruikt voor het positioneren: je zal ze aantreffen in printers, scanners, peristaltische pompen, en dergelijke. De sturing van kleine motoren gebeurt met een blokspanning, maar deze veroorzaakt grote koppelverschillen en een irritant geluid. Bij toepassingen waar dit ongewenst is, worden de spoelen gevoed met een sinusvormige spanning die per spoel in fase verschoven is. Beide types motoren kunnen als vasthoudrem dienen door een of twee spoelen permanent te bekrachtigen. Een motor met variabele reluctantie kan niet als generator gebruikt worden, aangezien het magnetisme van de rotor niet permanent is, maar geinduceerd wordt. Dat is één van de nadelen van deze motoren. Reluctantiemotoren kunnen wel uitgerust worden met permanente magneten.
Om een draaiveld op te wekken moet de statorpool bekrachtigd worden als de rotorpool naar hem toe beweegt, dus voor het bereiken van de inductiepiek. De vorm van de stroom die door de wikkeling gestuurd wordt komt absoluut niet overeen met driefasige wisselspanning. Men gebruikt een blokspanning die gemakkelijker te realiseren is met een eenvoudige schakeltransistor, maar men had ook een schakelende voeding kunnen gebruiken die een curve van gauss produceert. Met een zachte curve worden de koppelveranderingen onderdrukt. De polariteit van de spanning speelt geen rol, het is de absolute stroomsterkte die bepalend is. De stroom produceert het magnetisch veld, maar het is niet belangrijk of die N-Z gericht is of omgekeerd. Bepaalde motoren voor hoger vermogen zijn uitgerust met kleine magneten om de werking van de motor te verbeteren: dan speelt de richting van het magnetisch veld wel een rol. Bij lage snelheden en lage vermogen heeft men geen positiesensor nodig. De electronika gaat ervan uit dat de motor naar de juiste positie getrokken werd. Indien de motor te zwaar belast wordt of als de snelheid te snel opgevoerd werd dan verspringt de motor of blijft die steken in een bepaalde positie.
De motor heeft een zeer variabel koppel, dit kan wat beperkt worden door een aangepaste electronische sturing. Er is ook saturatie van het metaal in de hoeken van de polen die tegenover elkaar staan, waardoor het magnetisch veld (en dus het koppel) beperkt wordt. Dergelijke stappenmotoren produceren een sterk wisselend koppel en bijhorende trillingen, zeker als de sturing niet optimaal is. Een dergelijke motorconstructie wordt niet gebruikt voor hogere vermogens, dan gebruikt men moderne reluctantiemotoren. |

 Links heb je de inductie (H) volgens de rotatie van de rotor. De inductie ("magnetissche stroom") is maximaal als de magnetische weerstand minimaal is, dus als de luchtspleet minimaal is. Het betreft een motor met 6 statorpolen, dus drie fasen.
Links heb je de inductie (H) volgens de rotatie van de rotor. De inductie ("magnetissche stroom") is maximaal als de magnetische weerstand minimaal is, dus als de luchtspleet minimaal is. Het betreft een motor met 6 statorpolen, dus drie fasen.

Publicités - Reklame