| De sleepringankermotor heeft een anker waarvan men de weerstand kan wijzigen en dus ook de aanloopstroom kan beperken. |
-
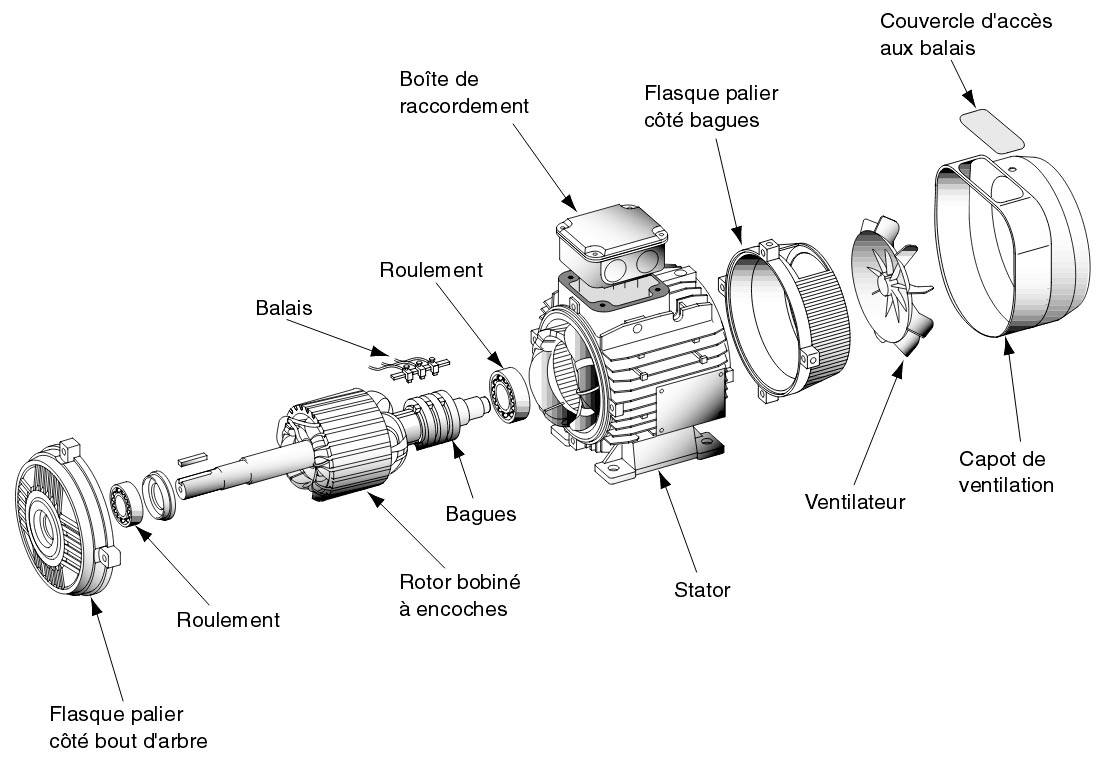
Sleepringankermotor
 Er is een aansluitdoos voor de stator (stroomtoevoer van het electriciteitsnet) en een aansluitdoos voor de rotor (verbonden met een regelbare weerstand). De meest gebruikte motoren in de industrie zijn asynchrone motoren met kortsluitanker, maar deze hebben bepaalde nadelen. De aanloopstroom is zeer hoog: je moet een asynchrone motor zien als een transformator, met een primaire wikkeling (stator) en secundaire wikkeling (rotor). De secundaire wikkeling heeft een zeer lage weerstand. Als een asynchrone motor start, dan vormt het anker nagenoeg een kortsluiting. De aanloopstroom kan zeer hoog zijn (tot 10× de nominale stroom). Om de aanloopstroom te beperken kan met de weerstand van de secundaire wikkeling (het anker) verhogen, bijvoorbeeld door dunnere staven te gebruiken, of door messing in plaats van koper te gebruiken. Dit heeft echter als nadeel dat de motor nooit optimaal werkt omdat er permanent verliezen zijn in het anker.
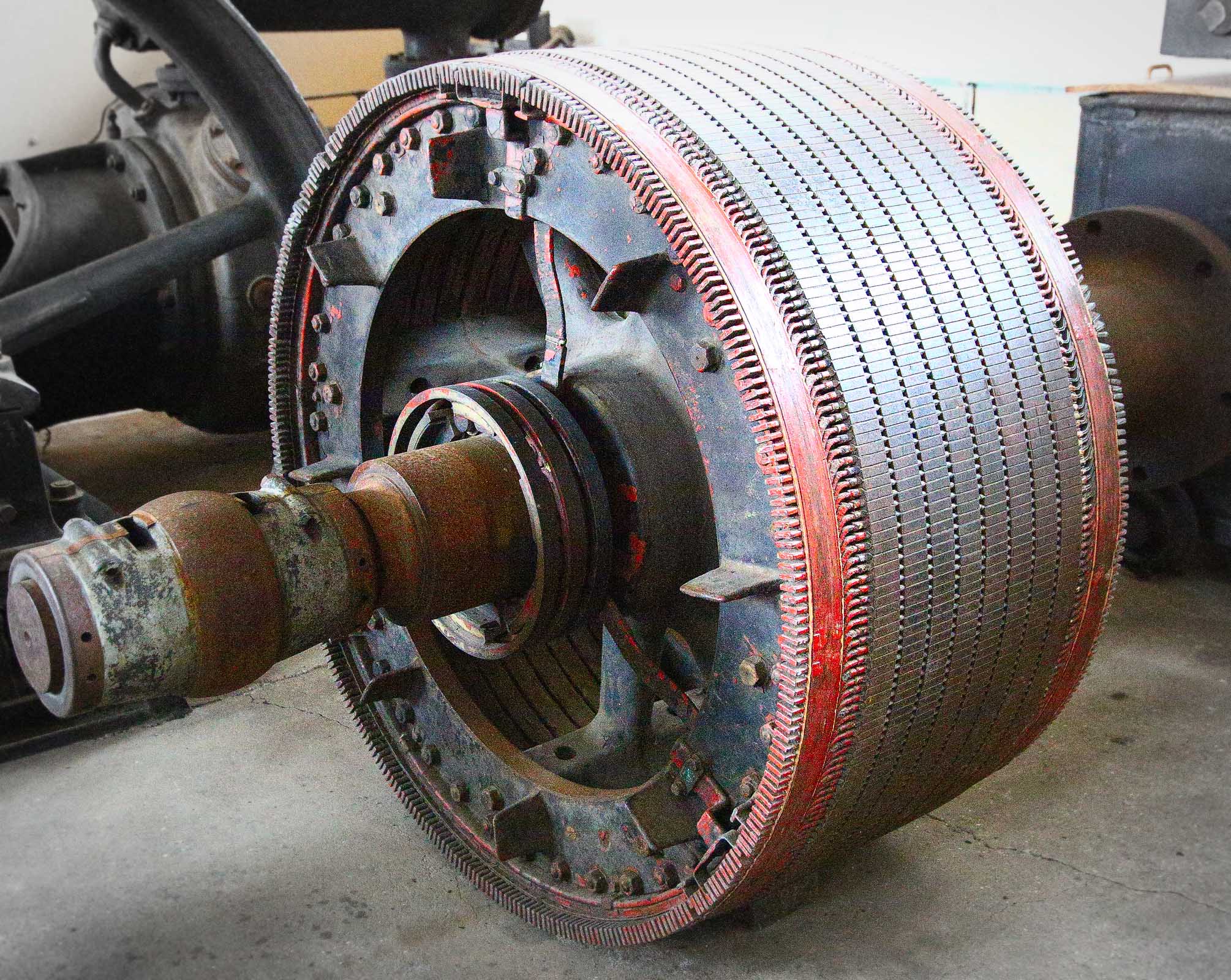
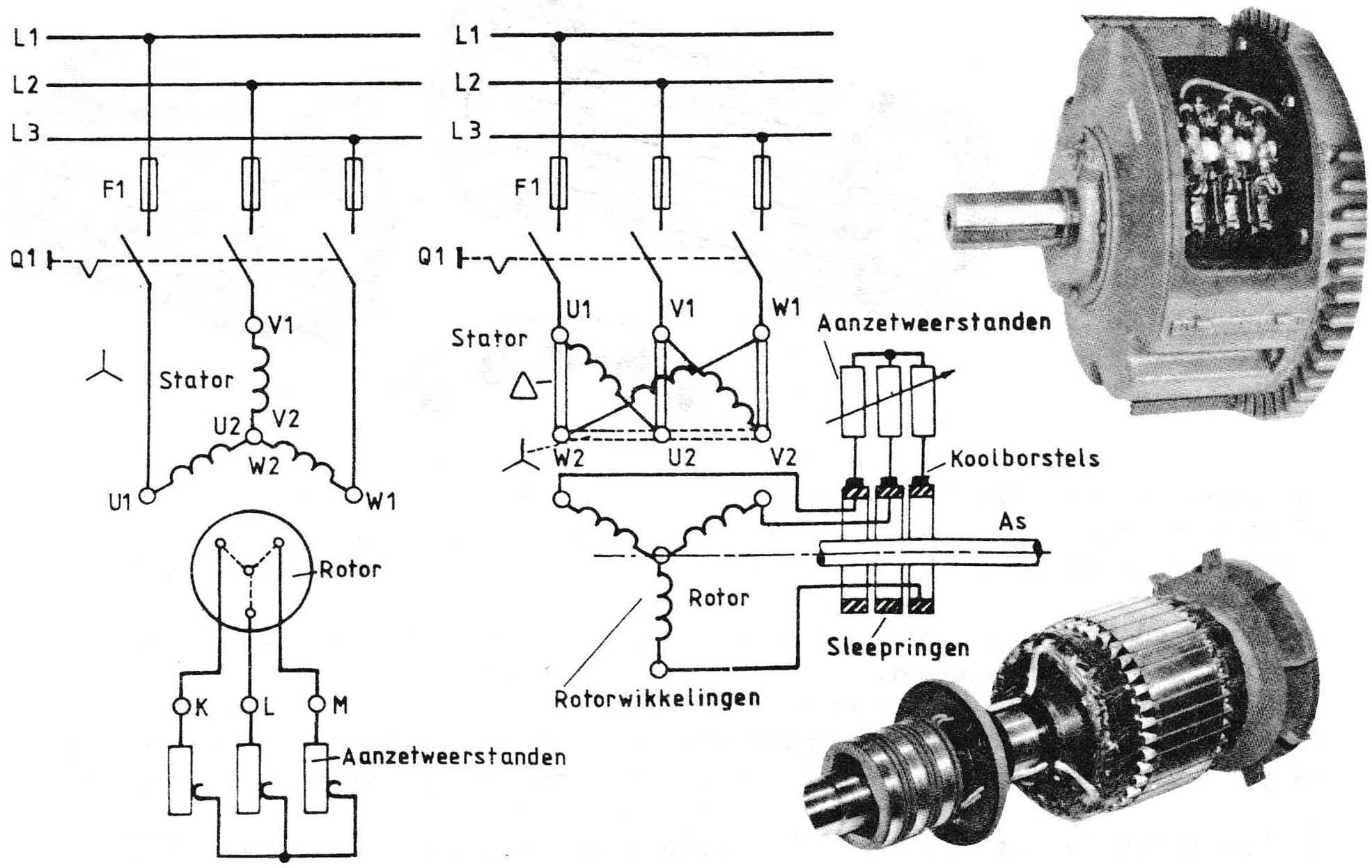
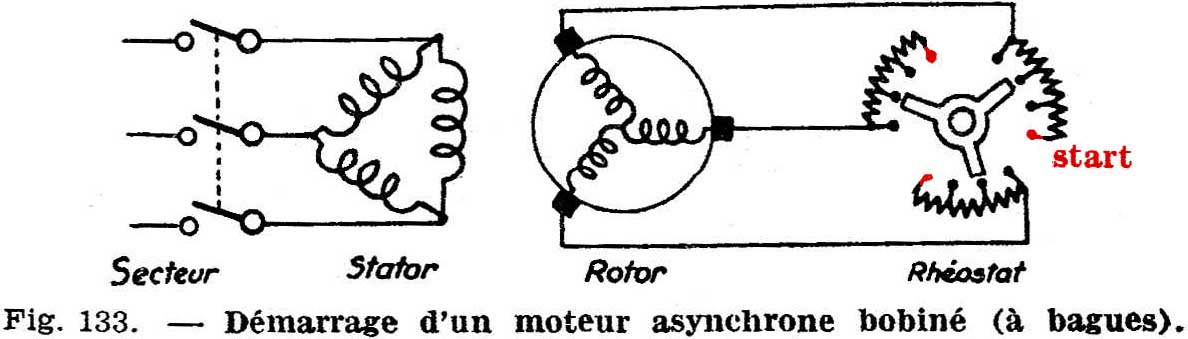
Door een gewikkeld anker te gebruiken en het anker te verbinden met externe weerstanden bekomt men een sleepringankermotor. Om een soepele werking met gelijkmatige koppel te bekomen is de rotor driefasig gewikkeld, dus met drie sleepringen. Op de foto zijn twee van de drie staven die de stroom van het anker naar de ringen brengen goed zichtbaar.
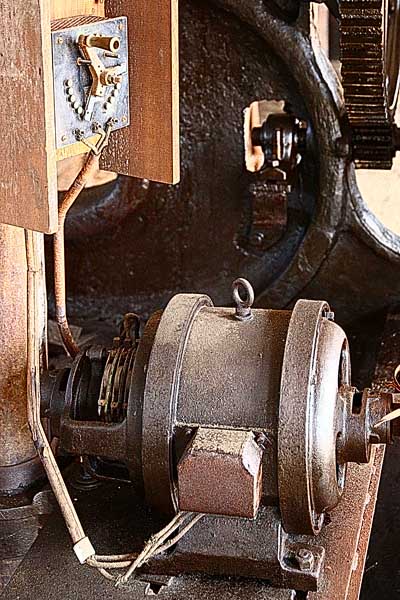
De stator komt overeen met die van een klassieke kortsluitankermotor. De fotos zijn afkomstig van het mijnmuseum in Lewarde, de motor wordt hier gebruikt om een persluchtcompressor aan te drijven. Achteraan in beeld ziet men de rheostaat om het anker te belasten. Eenmaal dat de motor zijn nominaal toerental bereikt heeft worden de weerstanden kortgesloten.
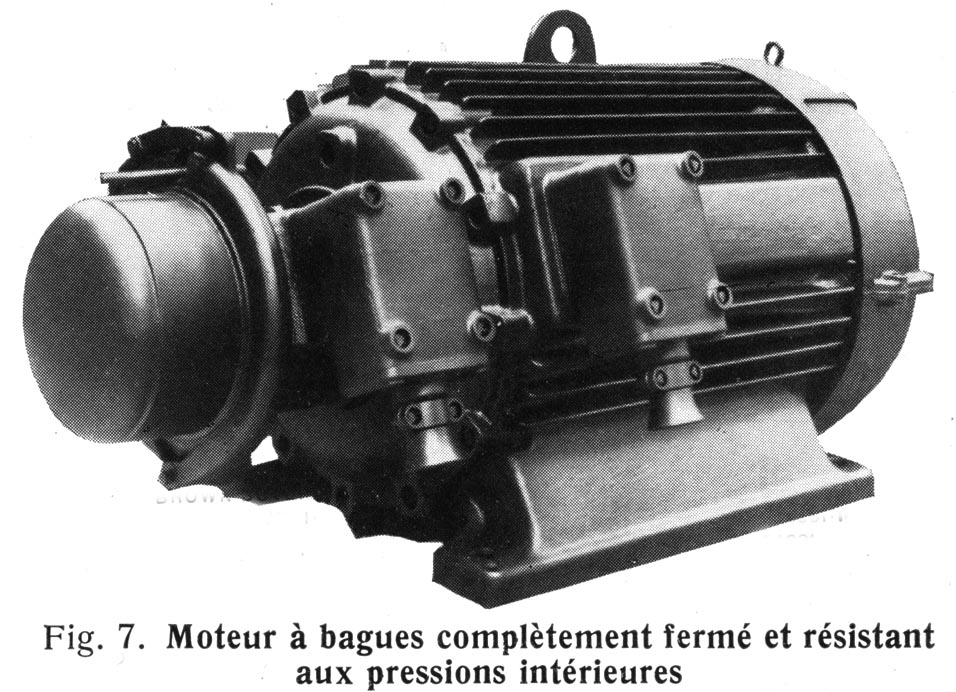
De schutsluis van Ittre gebruikt een asynchrone motor met gewikkeld anker voor de bediening van de hefdeur (één motor per deur). Wat heeft het voor nut om ankerweerstanden te gebruiken? Waarom niet gewoon statorweerstanden gebruiken? De nadelen van sleepringen zijn genoeg bekend: ze verslijten en moeten regelmatig onderhouden worden. Het voordeel is dat het vermogen in de ankerkring beperkter is: men kan dus kleinere weerstanden gebruiken. Met statorweerstanden zou een motor van 200kW (zoals die in Lewarde) ook weerstanden van 200kW nodig hebben. Hier kan het vermogen van de weerstanden beperkt worden tot 5kW. Waarom geen regelbare transfo gebruiken om de motor aan te zetten? Een regelbare transfo is duur, zeker als die driefasig uitgevoerd moet worden. De contacten moeten regelmatig onderhouden worden. Maar wat de doorslag geeft is dat een sleepringankermotor een hoger aanloopkoppel heeft dan een motor waarvan men de statorspanning verlaagt door weerstanden of een regelbare transfo. De laatste foto rechts toont ons een oude driefasige asynchrone motor. Als de motor op snelheid gekomen was, konden de weerstanden kortgesloten worden. De weerstanden worden manueel uitgeschakeld als de motor zijn nominale spanning bereikt, maar grotere motoren kunnen uitgerust worden met een automatische schakelaar. De centrifugaalschakelaar en weerstanden zijn op de rotor zelf gemonteerd. In tegenstelling met statorweerstanden zijn de ankerweerstanden veel kleiner en bedraagt de spanning slechts een tiental volt bij het starten. De motor is immers een transformator, en door weinig wikkelingen (maar dikke) aan het secundair (de rotor) te gebruiken bekomt men ook een lage, veilige spanning. Het secundair is daarbij volledig geïsoleerd van het primair. Van zodra de motor begint te draaien zakt de opgewekte spanning verder. De sleepankermotor vertoont grote mechanische gelijkenissen met de Double Fed Induction Generator die als asynchrone generator gebruikt wordt (de werking is natuurlijk volledig anders). Rechts een bladzijde uit een electriciteitscursus, met alles wat je moest weten overdergelijke motoren: hoe aansluiten, hoe zien de borstels er uit en hoe ziet de rotor er uit.
Indien de belasting redelijk constant is kan men de rotorweerstanden gebruiken om het toerental van de motor te regelen, wat niet mogelijk is door de voedingsspanning van de motor te wijzigen. Indien men de voedingspanning van een inductiemotor verlaagt, dan is het statorveld zwakker, waardoor er meer slip ontstaat. Door de hogere slip ontstaat er een sterkere geïnduceerde spanning in het anker, waardoor ook de stroom in de stator hoger wordt (principe van de transformator). Als de spanning lager wordt stijgt de stroom, waardoor het opgenomen vermogen ongeveer identiek blijft. De curve met R=0 komt overeen met de curve van een motor met kortsluitanker (de volledige curve is te zien op de pagina over de gewone inductiemotor). Als de ankerweerstand hoger wordt, dan daalt de rotatiesnelheid (bij een gelijkblijvende belasting). De omwentelingssnelheid naargelang de belasting blijft redelijk constant bij een kortgesloten anker, maar is minder stabiel als de weerstanden ingeschakeld zijn (paarse aanduiding). Bij een constante belasting kan men de snelheid regelen met de weerstanden. De verliezen in de weerstand zijn eerder beperkt (voor motoren van een relatief laag vermogen), zelfs als de motor permanent op een lager toerental draait, dit was daarom een manier om het toerental van de motor op een eenvoudige manier te regelen tot men overschakelde op frekwentieregelaars. Indien de rotorwikkelingen, de weerstanden of de sleepringen onderbroken worden, dan kan de motor niet starten. De motor gedraagt zich als een transformator zonder secundaire belasting. Er is geen risico dat de motor zou verbranden, want er loopt geen stroom door het "secundair". Enkel als de rotorwikkelingen of de sleepringen kortsluiting zouden maken kan de stroom in de rotor sterk oplopen als de motor niet draait. De aanloopstroom van de motor kan daardoor te hoog worden. Als de motor een lange tijd op een verlaagde snelheid moet kunnen draaien heeft men een grote slip, en dus ook veel vermogen dat verloren gaat. Met kan dit vermogen echter recupereren, dit is de Scherbius motor. Deze motor wordt gebruikt in grote installaties waarbij de motor een lange tijd op een verlaagd toerental moet draaien. De meerkost van de installatie wordt gerecupereerd door het hoger rendement op verlaagd toerental.
Ster/driehoek startschakeling of frekwentieregelaarDe ster-driehoekschakeling is de meest voorkomende startmethode vanwege zijn eenvoud, maar het aanloopkoppel is beperkt (zoals het starten met weerstanden of een regelbare transfo). Wanneer het erop aankomt een motor te starten onder belasting zal men eerder een sleepankermotor gebruiken. Het starten gebeurt dan met een verhoogd koppel, maar met een beperkte verhoogde aanloopstroom.Tegenwoordig gebruikt men liever een gewone kortsluitankermotor met frekwentieregelaar waarbij men de motorparameters kan instellen in de regelaar zelf. Voor hoge vermogens gebruikt men een synchrone motor, een motor met variabele reluctantie of voor de zware belastingen een motor volgens het principe van Scherbius. |


Publicités - Reklame