| De reluctantiemotor is een synchrone motor, het is een heruitvinding van de stappenmotor. |
-
 De stappenmotor is de eerste vorm van de reluctantiemotor. Dergelijke motoren worden nog steeds gebruikt voor lage vermogens, wanneer de motor nauwkeurige stappen moet zetten (motoren van printers, enz).
De stappenmotor is de eerste vorm van de reluctantiemotor. Dergelijke motoren worden nog steeds gebruikt voor lage vermogens, wanneer de motor nauwkeurige stappen moet zetten (motoren van printers, enz).
De reluctantiemotor kwam in de belangstelling toen er aangepaste frekwentiesturingen op de markt kwamen (VFD: variable frequency drive). De motoren hebben een hoog rendement maar hebben in de meeste gevallen een aangepaste frekwentiesturing nodig. De reluctantiemotor (en in het bijzonder de synchrone reluctantiemotor die een gladde rotor heeft in tegenstelling met de stappenmotor) heeft sleuven zodat de rotor gebieden heeft met een lage en hoge reluctantie. De de reluctantie is minimaal volgens d en d' (hoge veldsterkte mogelijk) en laag volgens de lijnen q en q'. De motor is echter een compromis: om een voldoende barrière te vormen moeten de sleuven breed genoeg zijn, waardoor er niet veel plaats is voor het metaal. Er kan dus saturatie optreden op de rode plaatsen. Door de saturatie wordt het magnetisch veld beperkt en wordt het koppel beperkt. Aan de andere kant moeten er ook bruggen voorzien worden zodat de rotor voldoende stabiel is. Door de bruggen loopt er een parasitaire flux richting q en q'. De rotor is relatief broos ten opzichte van een inductiemotor et de motorsnelheid moet beperkt worden, zeker bij motoren met een groot diameter. Tegenwoordig worden de sleuven gevuld met een amagnetisch materiaal (plastiek, haars, carbon fiber,...) om de rotor sterker te maken.
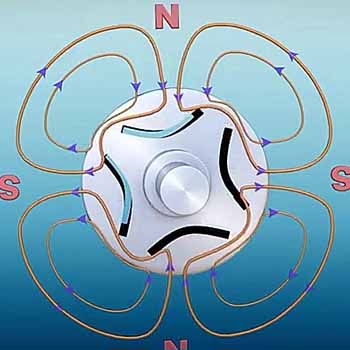
Hoogvermogen motoren met variabele reluctantieZo'n motor heeft een aangepaste frekwentieregelaar nodig zodat alle fasen onafhankelijk gestuurd kunnen worden (schema linkss). Daarom bleef de motor lang onbenut in de vergeetput, totdat men geschikte frekwentieregelaars kon ontwerpen. Dankzij de frekwentieregelaar werkt de motor soepel op alle snelheden en is het rendement hoger dan die van een asynchrone motor. Deze regelaar die de wikkelingen onhafhankelijk van elkaar kan aansturen kan
 De stroomcurve door de drie fasen. De curve is aangepast aan het motortype, eenzelfde curve kan niet voor alle reluctantiemotoren gebruikt worden.
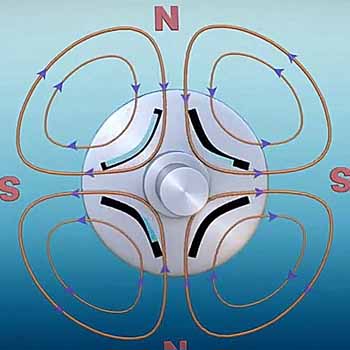
Links een industrie-motor. De uitstekende polen van de stappenmotor zijn verdwenen en het koppel is meer continu. De donkere delen zijn de fluxbarrières die een epoxy haars bevatten. Op de motor hironder links zijn de fluxbarrières de heldere delen die uit een niet-magnetisch metaal bestaan. De moderne reluctantiemotor die in de industrie gebruikt wordt kan met een driefasige spanning aangestuurd worden, maar er is altijd een frekwentieregelaar nodig want een reluctantiemotor (zoals alle synchrone motoren) heeft nagenoeg geen aanloopkoppel. Een hoog rendement en een stabiel koppel kan enkel bereikt worden met een aangepaste regelaar, maar de aansturing kan met drie draden gebeuren (zoals bij een klassieke driefasige motor). De aansturing via de drie onafhankelijke spoelen is niet meer nodig.
Het is enkel de moeite om motoren met variabele reluctantie toe te passen als de motoren nagenoeg continu kunnen werken (klimaatregeling, grote koelcellen,...). De motor kan op zich een besparing van 6% op de electriciteit realiseren, en daarbovenop kan ook nog de besparing bijkomen door het gebruik van een frekwentieregelaar die het toerental kan regelen naargelang de belasting. De reluctantiemotoren zijn in volle ontwikkeling en er zijn zelfs motoren die met een aluminium kooianker uitgerust zijn zodat ze direct op het net gestart kunnen worden (direct start motoren). Deze motoren zijn minder geschikt om gebruikt te worden met een aangepaste frekwentieomvormer, want de niet-sinusoïdale spanningsvorm veroorzaakt verliezen in het kooianker. Deze motoren kunnen dan weer wel gebruikt worden met standaard frekwentiesturingen voor asynchrone motoren. De evolutie is nog volop aan de gang en het is niet denkbeeldig dat op termijn de meeste motoren uitgerust zullen worden met een ingebouwde regeling (positiesensor, stuurelectronica en vermogenselectronica). Het toerental zou dan eenvoudig met een spanning 0..10V ingesteld kunnen worden.
Gebruik in electrische auto'sDeze motoren waren al gekend, maar krijgen een boost door het gebruik ervan in bepaalde electrische auto's. Deze motoren zijn pas op de markt gekomen als er geschikte frekwentieomvormers beschikbaar waren.
De motoren die in electrische auto's gebruikt worden moeten aan zeer specifieke eisen voldoen. Ze moeten een hoog koppel hebben en efficient zijn over een zeer breed toerental. Indien het rendement van een motor met 1% stijgt, dan betekent dit een verhoogde autonomie van een 10-tal kilometer. Wat men natuurlijk vergeet te vermelden, is dat bij het laden men meer dan 10% verlies heeft (tot 25% verlies bij bepaalde auto's). Deze waarde ziet men niet in de statistieken, enkel de autonomie van de wagen in de best mogelijke omstandigheden. Om een accu van 50kWh op te laden heb je eigenlijk 60kWh nodig! Maar we keren terug tot onze motoren. De motor moet een hoog koppel hebben bij lage toerentallen (om snel te kunnen optrekken) en moet een hoog rendement hebben op alle toerentallen. De afbeeldingen rechts tonen de rotor van een motor van een electrische auto. De stator heeft 4 polen (maar er zijn ook motoren met 6 polen). De synchrone motor met permanente magneten heeft een hoger rendement en koppel op lage toerentallen. Er is geen slip die verliezen veroorzaakt. Maar bij hogere snelheden veroorzaken de permanente magneten een tegen-EMK (electromotorische kracht) in de spoelen. Deze tegen-EMK werkt de spanning die over de spoelen gezet tegen. Er is een hogere voedingsspanning nodig om deze tegen-EMK te compenseren, dus is er meer vermogen nodig. De motor met variabele reluctantie heeft geen permanente magneten, en dus ook geen tegen-EMK. De motor heeft een koppel dat stabiel is over een breed gebied. Om snel te kunnen optrekken, maar om ook een hoog rendement te hebben op hogere snelheden gaat men beide motoren combineren. De rotor heeft zowel sleuven om een hoge reluctantie te bekomen en permanente magneten zoals een gewone synchrone motor. De magneten zijn gekozen omwille van hun lage permeabiliteit (hoge reluctantie) en kunnen dus geplaatst worden in de sleuven. De motor heeft ook een positiesensor die aan de electronica gekoppeld is, en hier wordt het interessant: door de fase van de stroom te opzichte van de rotorpositie te wijzigen kan men de motor eerder gebruiken als reluctantie motor of als motor met permanente magneten. Als de bestuurder plankgas geeft, dan laat de electronica de motor werken als motor met permanente magneten (hoog koppel), als de besturder weinig gas geeft, dan wordt de faseverschuiving aangepast om de motor als reluctantiemotor te laten werken. Dankzij de permanente magneten in de rotor kan de motor gemakkelijk als alternator gebruikt worden bij het afremmen. Hier is het de tegen-EMK die men gaat gebruiken om de batterijen weer wat op te laden. Het is niet enkel Tesla die dergelijke motoren gebruikt. Ook Toyota (en andere autobouwers) gebruiken dergelijke motoren; Toyota gebruikt die motoren in zijn hybride voertuigen die minder in de kijker lopen. |

 De motor met variabele magnetische weerstand wordt gebruikt daar waar men sowieso een frekwentieregelaar moet gebruiken (pompen en ventilatoren met variabel debiet) of daar waar het plaatsen van een regelaar het rendement zou verbeteren zoals in koelcellen. De motor van een koelcel kan in aan/uit modus werken, maar kan ook frekwentiegestuurd worden.
De motor met variabele magnetische weerstand wordt gebruikt daar waar men sowieso een frekwentieregelaar moet gebruiken (pompen en ventilatoren met variabel debiet) of daar waar het plaatsen van een regelaar het rendement zou verbeteren zoals in koelcellen. De motor van een koelcel kan in aan/uit modus werken, maar kan ook frekwentiegestuurd worden.

Publicités - Reklame