| Voor de komst van electronische frekwentieregelaars gebruikte men gelijkstroommotoren samen met een Ward-Leonard schakeling als men een nauwkeurige sturing van de motor nodig had. |
-
HistoriekDe eerste vermogenstransistoren en thyristoren worden gefabriceerd in de jaren 1970. Het is dan ook vanzelfsprekend om ze te gebruiken in typische toepassingen, zoals het regelen van het toerental van wisselstroommotoren.In de eerste installaties gebruikte men thyristoren die redelijk gemakkelijk aangestuurd konden worden: een puls op de gate zorgt dat de thyristor in geleiding komt. De thyristor kan enkel uit geleiding gaan als die een negatieve puls op de anode krijgt. Die puls is afkomstig van de volgende thyristor die in geleiding gaat. Het is niet mogelijk om alle thyristoren uit geleiding te hebben: de puls-pauze verhouding blijft maximaal en dit is het belangrijkste nadeel van frekwentieregelaars met thyristoren:
Er werden proefopstellingen gedaan met klassieke transistoren, maar deze hebben een complexe stuurschakeling nodig. Er is veel vermogen nodig om een transistor in en uit geleiding te brengen. Een frekwentieregelaar heeft minstens 6 vermogen transistoren nodig, en die hebben allemaal een eigen voeding nodig. Veldeffekt transistoren (MOSFET) hebben slecht weinig vermogen nodig om te schakelen. Ze trekken enkel vermogen tijdens het schakelen, en deze verliezen kan men verder beperken door de schakelfrekwentie zo laag mogelijk te kiezen. De frekwentie bedroeg vroeger 4kHz, maar met moderne transistoren haalt men schakelfrekwenties boven de 20kHz, waardoor het schakelen niet meer hoorbaar is. Veldeffekt transistoren zijn ook meer stabiel en men kan het vermogen verhogen door transistoren bij te plaatsen, wat niet het geval is met klassieke transistoren.
Technische achtergrondDe motoren die het meest gebruikt zijn, zijn asynchrone motoren (kortsluitanker motoren): ze zijn eenvoudig, goedkoop en betrouwbaar, ik noem ze deegrolmotoren vanwege de vorm van de rotor. Maar ze hebben ook een aantal nadelen: een gemiddeld aanloopkoppel, terwijl de aanloopstroom maximaal is. Het is mogelijk een motor te bouwen met een hoger aanloopkoppel en/of een lagere aanloopstroom, maar deze motoren hebben een lager rendement bij hun nominaal toerental. Het is onmogelijk een perfekte asynchrone motor te bouwen die in alle omstandigheden voldoet.Ten gevolge van de hoge aanloopstroom moet er een voorziening zijn om zware motoren op een lagere spanning te doen aanlopen (zoals de ster-driehoekschakeling). De motor moet dan onbelast kunnen starten, en indien dit niet mogelijk is moet de motor en de electriciteitsvoorziening zwaarder uitgevoerd worden dan strikt noodzakelijk. Kortsluitankermotoren hebben een blindvermogen nodig om een sterk magnetisch veld op te wekken, nog voor dat de motor enige arbeid kan leveren. De arbeidsfaktor van dergelijke motoren is dus beperkt, zeker als de motor op een lage belasting werkt (het blindvermogen dat constant is, is relatief groot ten opzichte van het effektief vermogen).
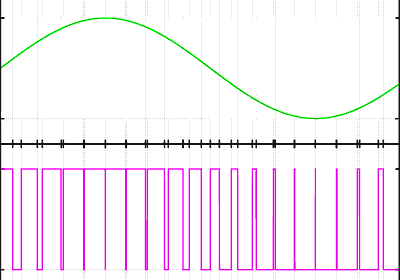
Werking van een frekwentieregelaarDe bedoeling is een sinusvormige uitgangsspanning te bekomen, zodat de motor soepel draait op alle snelheden. Indien men een electronische schakeling gebruikt zoals in een audio-versterker, dan bereikt men slechts een maximaal rendement van 75%. Om een motor van 10kW aan te sturen (en in de industrie is dat echt niet veel), gaat er 2500W verloren in de vermogenstransistoren. Vanzelfsprekend is dit een systeem die nooit toegepast werd.Om een aanvaardbaar rendement te bekomen laat men de vermogenstransistoren schakelen tussen aan of uit. De verliezen zijn dan zeer beperkt en treden enkel op tijdens het schakelen zelf. Om de verliezen te beperken zal men een zo laag mogelijke schakelfrekwentie gebruiken. Men moet een schakelfrekwentie gebruiken die tienmaal hoger ligt dan de uitgansgfrekwentie, dus 500Hz voor een motor die op 50Hz aangedreven wordt. In de praktijk gebruikt men een schakelfrekwentie tussen 2 en 4kHz (en hoger). Dankzij deze wat hogere frekwentie kan men kleinere spoelen gebruiken om de pulserende spanning uit te middelen. Ook de motor vormt een enorme zelf-induktie, maar het is de bedoeling dat de schakelpulsen in de regelaar zelf volledig onderdrukt worden zodat de kabels naar de motor de stoorpulsen niet uitstralen.. Om een constant koppel te bekomen moet de spanning stijgen met de frekwentie (dit is niet mogelijk met thyristor-regelaars). Hoe hoger de frekwentie wordt, hoe hoger de motor-impedantie. Als de motor een hogere impedantie heeft, dan heeft men een hogere spanning nodig om een bepaalde stroom te laten lopen door de motor (de stroom bepaalt uiteindelijk het koppel). De moderne frekwentieregelaars die met MOSFETs of IGBTs zijn uitgerust kunnen werken met verschillende U/V curves en het koppel aan te passen aan het toerental. Zo kan men energie besparen als de motor op een lager toerental moet draaien:
Bepaalde toepassingen hebben een constante koppel en een stabiele snelheid nodig: dit is bijvoorbeeld het geval bij staalwalserijen. Als het koppel constant is, worden de staalplaten op een constante manier uitgerekt. Als de dunne staalplaten uiteindelijk op coils opgerold worden moet de oprolmachine een koppel hebben die afhangt van de omtrek van de coil. Bij transportbanden word er lanzaam versneld en afgeremd, zodat de produkten op de band niet omvallen. De snelheid/tijd curve die normaal een rechte is (constante versnelling), heeft hier een S-vorm.
Delen van een frekwentieregelaarDe meest voorkomende frekwentieregelaars bestaan uit een driefasige gelijkrichter, maar er bestaan ook frekwentieregelaars die met monofasé gevoed kunnen worden (vermogens tot ongeveer 2.2kW).De spanning wordt verder afgevlakt door middel van een zware elko en 6 transistoren die om beurt in geleiding gebracht worden zorgen ervoor dat er een sinusvormige driefasige spanning uit de regelaar komt. De ingebouwde filterspoelen (niet getekend) zorgen dat de blokspanning uitgemiddeld wordt. Er is ook nog een smoorspoel aanwezig tussen de gelijkrichters en de elko om de crestfactor te verbeteren. De diodes gaan namelijk slechts in geleiding als de netspanning hoger is dan de elkospanning, en dit zorgt voor storende belastingspieken op het electriciteitsnet. De smoorspoel zwakt de stroompieken af. Omdat we met driefasige spanning werken, is er altijd een diodepaar in geleiding, waardoor de smoorspoel goed zijn werk kan doen. De spoorspoel moet een hoge zelf-induktie hebben, aangezien we hier met de netfrekwentie werken (doorgaans 50Hz) en niet met de schakelfrekwentie van de uitgangstrappen. Vaak heeft de omvormer een aansluiting voor een extra externe smoorspoel (reactor genaamd). De frekwentieregelaar is in feite een speciale versie van de omvormer, zoals die ook gebruikt wordt om de batterijspanning om te zetten naar netspanning in een camper of om het vermogen van een zonnepaneel op het net te steken.
Vector control en Direct torque controlDe twee parameters van een motor, namelijk zijn snelheid en zijn koppel kunnen gemakkelijk ingesteld worden bij gelijkstroommotoren door het veranderen van de veldspanning en de ankerspanning. Daarom dat gelijkstroommotoren in gebruik zijn gebleven in bepaalde toepassingen, ondanks hun nadelen.De frekwentieregelaars met vector control hebben twee inputwaarden; de gewenste snelheid en koppel. Ook is de huidige motorpositie nodig. Omdat er een feedback is, kunnen deze regelaars de motorsnelheid exact regelen, rekening houdend met de slip. Bij direct torque control wordt er van de ene naar de volgende schakeltoestand overgegaan bij het overschrijden van de ingestelde koppelwaarde. Het koppel hang af van de magnetische flux en van de stroom, de flux wordt benaderd door de aangelegde spanning te integreren. Deze regelaar gebruikt dus geen vaste schakelfrekwentie, maar gedraagt zich eerder als een 6-trappenregelaar. De frekwentie hangt af van de huidige motorsnelheid en slip. In tegenstelling met de 6-trappenregelaar heeft de direct torque control stroomtransfos op de voedingslijnen naar de motor. Het schakelen gebeurt dus niet volgens een geprogrameerde frekwentie, maar hangt af van de motor zelf. Een processor berekent het schakeltijdstip aan de hand van het gevraagde koppel, de motorspanning en stroom.
Invoed van de regelaar op het motortypeBij de eerste regelaars was men verplicht een motor te kiezen die ruim bemeten was zodat die de hogere stromen die gepaard gaan met een werking op lage snelheid kon absorberen.Indien de motor regelmatig op lagere snelheid moet werken, moet er een extra ventilator voorzien worden. Dit is nog altijd nodig, zelfs met de meest moderne regelaars. Motorpech kan ontstaan indien men regelaars gebruikt die een slecht gefilterde uitgangspanning leveren. Er kunnen kortsluitingen in de windingen ontstaan (zowel tussen de wikkelingen onderling als van de wikkeling naar de behuizing). Hoe vreemd het ook mag klinken, ook de lagers kunnen daardoor beschadigd worden: door de schakelpieken raakt de rotor electrisch geladen, en deze lading vloeit dan weg via de kogels van de lagers. Deze panne kan vermeden worden door een degelijke aarding van de rotor. Verder is men vrijer in de keuze van de motor, en men zal een motor kiezen met een hoog rendement, terwijl de andere parameters (aanloopkoppel en aanloopstroom) ingesteld kunnen worden in de drive zelf. Frekwentieregelaars hoeven niet noodzakelijk gebruikt te worden om motoren te doen aanlopen of om hun snelheid soepel te regelen. Ik heb zo'n regelaar gebruikt om een groep studiolampen traag te doen opkomen zodat de gloeidraad minder snel doorbrand. De frekwentieregelaar zorgt ook voor een meer stabiele uitgangsspanning voor de lampen. Meer informatie over een spanningsregelaar voor studio-licht (continu licht). Een soft starter is een eenvoudige vorm van een frekwentieregelaar. Het is enkel mogelijk de spanning te beperken tijdens het aanlopen.
Frekwentieregelaars voor monofasig netEr bestaan monofasige frekwentieregelaars (motorvermogen beperkt tot 2kW). Dit zijn omvormers die gevoed worden uit het monofasig net en een driefasige motor kunnen aansturen. Vanaf een bepaald vermogen hebben de regelaars een driefasige ingang.De omvormers die een driefasige motor kunnen aansturen zijn een alternatief voor een Steinmetz-schakeling: je kan de motor op zijn nominaal vermogen gebruiken en je krijgt een toerentalregeling erbij. Volledig monofasige regelaars worden weinig gebruikt. Monofasige asynchrone motoren gebruiken een condensator om het draaiveld op te wekken. Bij een lage frekwentie is het draaiveld onvoldoende en moet de motor onbelast starten. |


Publicités - Reklame