| De asynchrone motoren worden het meest gebruikt. Een andere benaming voor de asynchrone motor is kortsluitankermotor of inductiemotor. Maar binnen de groep van asynchrone motoren bestaan er speciale gevallen. |
Asynchrone motoren
-
 De eerste inductiemotoren (asynchrone motoren): de motor van Ferraris gebruikt reeds een moderne poolvorm. In moderne motoren (en generatoren) gebruikt men verschoven statorpolen om een constante koppel te hebben. De motor heeft echter een koperen rotor. Koper is niet magnetisch en concentreert de magnetische krachtlijnen niet.
De eerste inductiemotoren (asynchrone motoren): de motor van Ferraris gebruikt reeds een moderne poolvorm. In moderne motoren (en generatoren) gebruikt men verschoven statorpolen om een constante koppel te hebben. De motor heeft echter een koperen rotor. Koper is niet magnetisch en concentreert de magnetische krachtlijnen niet.
De Tesla motor gebruikt een ringvormige stator, waardoor men een grote luchtspleet heeft door de plaats die de wikkelingen innemen. Maar de motor gebruikt reeds een gewikkeld anker. In het geel het magnetisch veld dat de ringkern moet verlaten en door de rotor gaan (tegengestelde velden). Toen wist men nog niet goed of men met een difasige spanning of een driefasige spanning zou gaan werken. Een difasige spanning leek een logische evolutie van de monofasige spanning. Maar uiteindelijk koos men voor driefasige spanning die als voordeel heeft dat men meer vermogen kan vervoeren met minder geleiders. Het ogenblikkelijk vermogen is ook altijd constant.
Synchrone en asynchrone motoren werken enkel op wisselspanning. Ofwel worden ze met triphasé (draaistroom) gevoed, ofwel moet er een voorziening zijn om een draaiend veld op te wekken (condensator). Het aansluiten van asynchrone driefasige motoren op het monofasig net wordt hier uitgelegd: dit is de steinmetz aansluiting. Asynchrone motor Boucherot type αDe asynchrone motor start met een hoge stroomopname. De secundaire wikkeling heeft een lage weerstand om een beperkte slip te hebben in normale werking, maar gedraagt zich als de secundaire wikkeling in kortsluiting van een transformator bij het starten.De sleepringankermotor heeft een regelbare weerstand om de weerstand van de rotor te wijzigen, maar daarvoor zijn sleepringen en borstels nodig. Een systeem dat minder bekend is, is de motor van Boucherot die twee statoren heeft, die ten opzichte van elkaar kunnen draaien. Bij het starten staan de statoren zodanig dat de statoren tegengestelde polen vormen. De stromen die in tegengestelde richting opgewekt worden moeten verplicht via de centrale ring lopen (resistief). Het starten gebeurt zo met een beperkte aanloopstroom (de "secundaire wikkeling" heeft een hoogohmige belasting). Als de motor zijn nominale snelheid bereikt wordt de rotor verdraaid zodat er één enkele pool gevormd wordt. De stroom moet niet meer door de middelste resistieve ring passeren. De motor heeft nu een hoog rendement en een beperkte slip. De werking van de motor komt overeen met een sleepringankermotor, maar zonder sleepringen (en dus geen slijtage). De motor wordt Boucherot type α genoemd. Er bestaat ook een Boucherot motor type "Y", dit is een motor met dubbele kooi (binnenste kooi is resistief, buitenste kooi is goed geleidend) en de naam Boucherot motor wordt niet meer gebruikt. De boucherot motor type α werd weinig gebruikt wegens zijn complexiteit. Slip van een inductiemotorEen asynchrone motor heeft een onvermijdelijke slip, dit in tegenstelling met de synchrone motor. Het is een kenmerk van de asynchrone motor, het is de slip die voor het rotorveld zorgt.De slip kan je zelf ervaren door de asynchrone motor te voeden met een gelijkspanning (ongeveer 24V voor een motor op 220V), twee polen aan de min en één pool aan de plus aansluiten. De motor gaat niet draaien, in tegendeel, de rotor wordt sterk afgeremd. De lage spanning is nodig omdat er geen wisselveld opgebouwd moet worden: de stroom in de motor is niet meer beperkt door de zelfinduktie van de statorwikkeling maar enkel beperkt door de weerstand van de spoelen. Als je de spanning aansluit, dan merk je dat het zeer moeilijk wordt om de motor te verdraaien, maar in tegenstelling met een synchrone motor blokkeert de motor niet in een bepaalde positie. De remkracht stijgt lineair met de rotatiesnelheid (en met de aangelegde gelijkspanning). Er wordt van deze mogelijkheid gebruik gemaakt om een asynchrome motor te remmen. De remkracht is gradueel en proportioneel met de stroom, en dus met de aangelegde gelijkspanning. Er is geen mechanische slijtage (remblokjes), deze remmethode werd bijvoorbeeld ook toegepast in bepaalde vrachtwagens. Als er een wisselspanning aangelegd wordt (draaiveld), dan wordt de remkracht een drijfkracht. MotorschakelaarAsynchrone motoren hebben een hoge aanloopstroom en moeten beveiligd worden door middel van een tijdschakelaar.
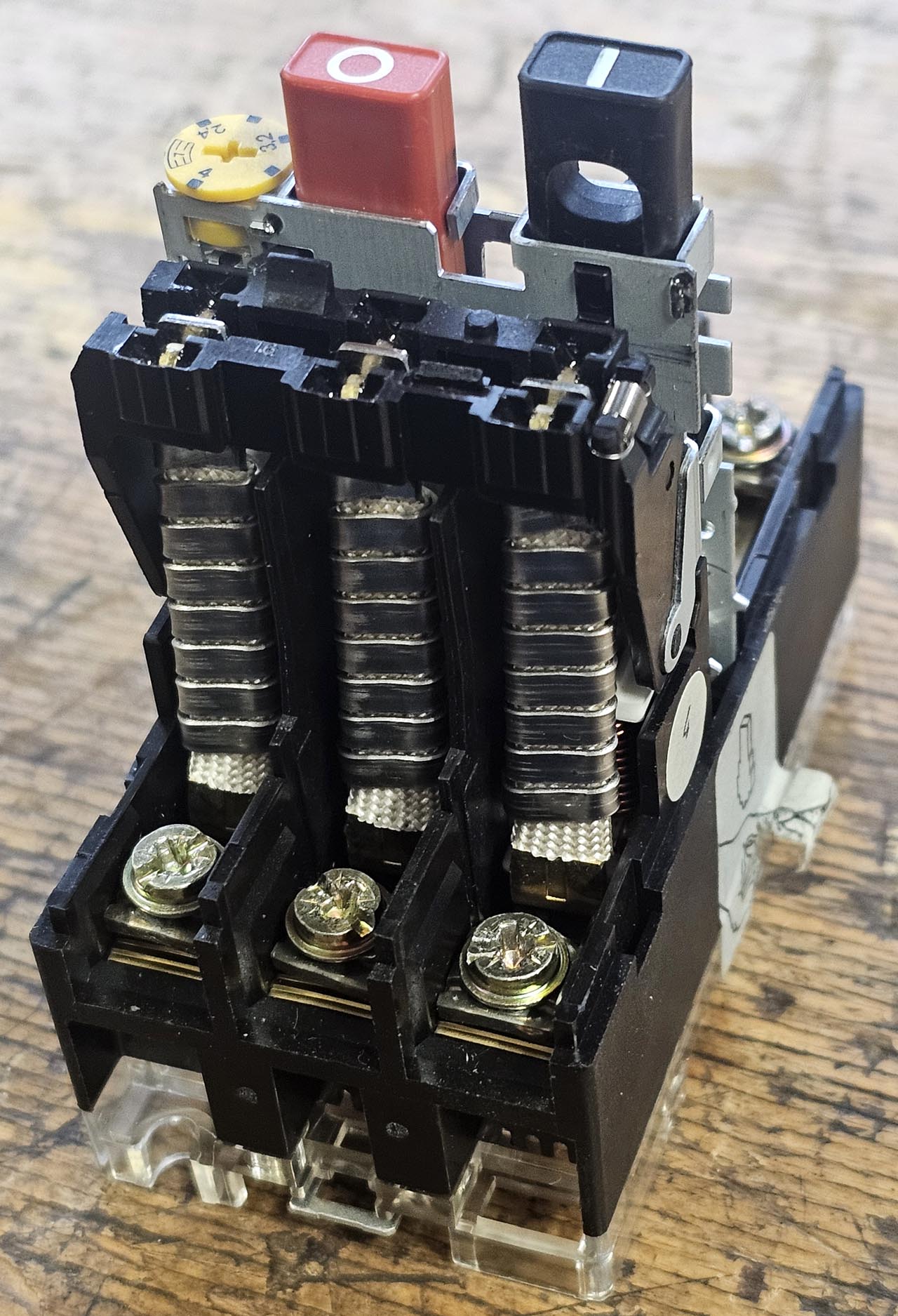
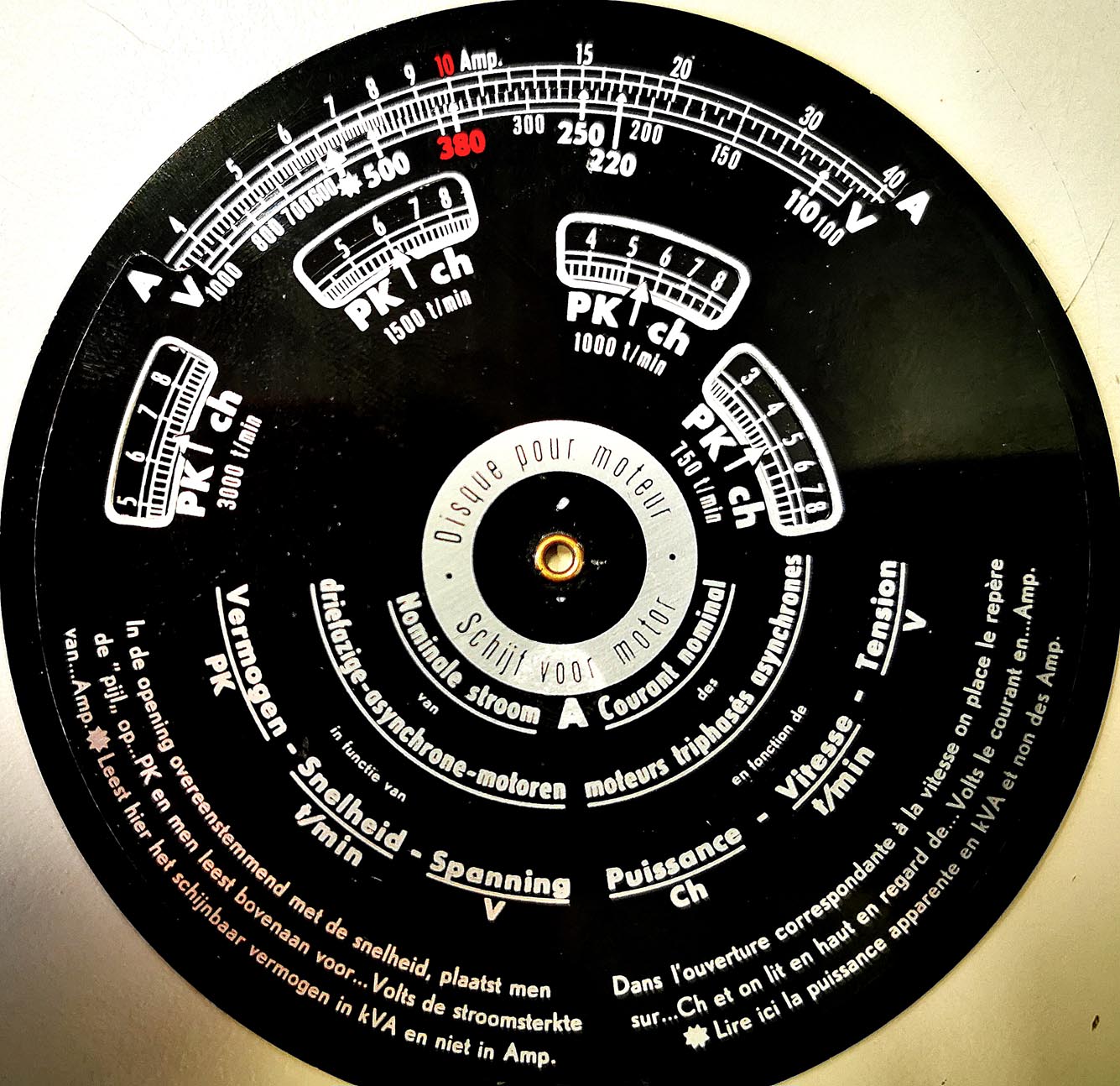
De maximale stroom wordt éénmaal ingesteld (hier tussen 10 en 16A en tussen 2.4 eb 4A in de tweede schakelaar). Indien het starten te moeizaam gebeurt en de maximale stroom gedurende meerdere seconden overschreden wordt, dan werkt de thermische zekering. Dit is ook het geval als de motor lange tijd overbelast wordt. De verwarming van de motor komt overeen met de verwarming van het bi-metaal. De motor zelf moet eigenlijk geen thermische zekering meer hebben, want die zit in de motorschakelaar. De stroom door de motor loopt ook door de drie metalen wikkelingen en verwarmen zo de drie bi-metalen. Er is ook een magnetische uitschakeling bij kortsluiting (directe uitschakeling bij een stroom van 192A). Deze beveiliging is vergelijkbaar met de zekeringen bij residentiële klanten. Rekenschijf voor inductiemotorenRechts een rekenschijf voor het bepalen van het vermogen van een asynchrone motor. Men stelt de schijf in op het gewenst vermogen (toen nog uitgedrukt in PK) en de motorsnelheid, bijvoorbeeld 6PK en 1500 omwentelingen per minuut) en men kan de benodigde stroom aflezen tegenover de netspanning. Bij 380V heeft men een stroom van 10A nodig. Hoe lager de voedingsspanning, hoe hoger de stroom, natuurlijk.Men merkt ook dat de motoren die sneller draaien (3000 toeren (in feite een beetje minder, want het zijn asynchrone motoren) een wat hoger rendement hebben dan trager draaiende motoren (met twee, drie of meervoudige polen). Een snelheid van 3000 toeren is de maximale snelheid die men met een asynchrone motor kan bekomen. Maar zelfs met een lager rendement is een trager draaiende motor vaak te verkiezen boven een sneldraaiende motor, want de gearbox veroorzaakt een vermogensverlies. Maar door de gearbox kan men een hoger startkoppel bekomen: naargelang de omstandigheden zal de ene of de andere oplossing de beste zijn. Om een gelijkmatige koppel te hebben die soepel overgaat van de ene pool op de andere bulgaar gebruikt men verdeelde wikkelingen (enroulements répartis). |

Publicités - Reklame