| De asynchrone motoren zijn het meest gebruikte type motoren. Ze zijn eenvoudig en zeer betrouwbaar. Een asynchrone motor wordt ook inductiemotor of kooiankermotor genoemd. |
-
Asynchrone motor
De meeste motoren die op wisselspanning werken zijn asynchrone motoren vanwege hun eenvoud. Deze motoren kunnen ook gebruikt worden als hypersynchrone generator. De andere types asynchrone generatoren worden op deze pagina verder besproken. De asynchrone motor wordt ook inductiemotor genoemd (gebaseerd op de inductie) of kooiankermotor (want het anker bestaat uit een soort geleidende kooi). De engelse benaming is induction motor of sqirrel cage motor.
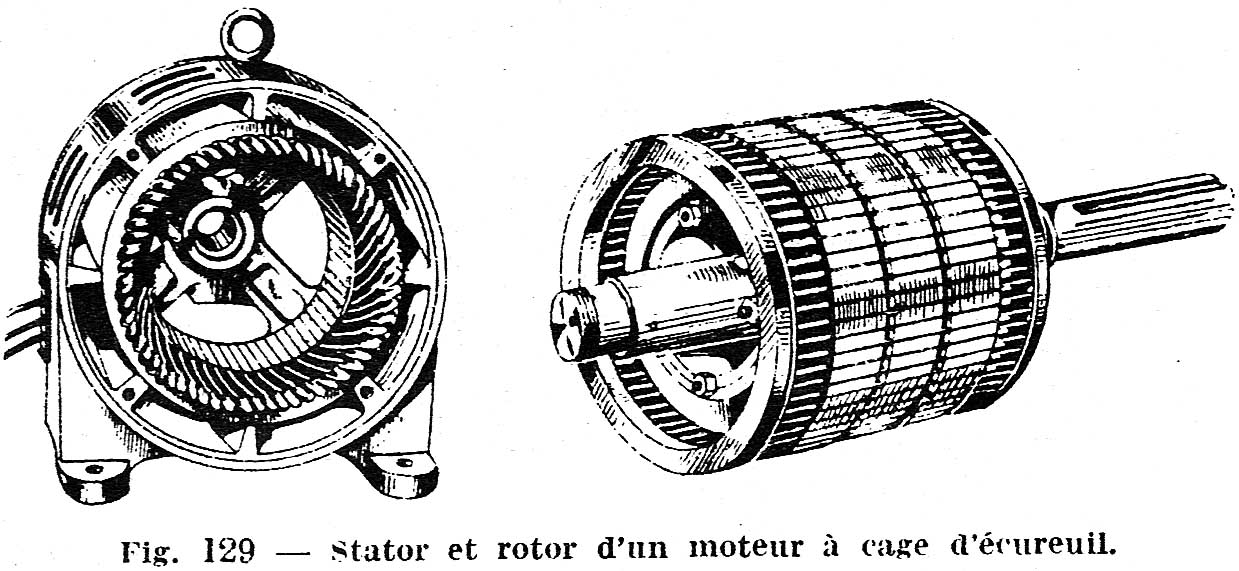
Rechts de doorsnede van een inductiemotor uit de industrie. Het vermogen van een asynchrone motor kan oplopen tot meer dan 50kW. Voor nog hogere vermogens kiest men meestal een andere type motor die een hoger rendement heeft.
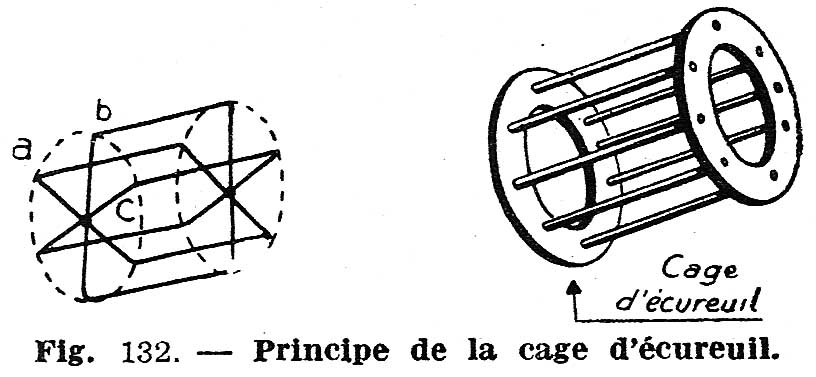
Werking van een asynchrone motorAls men een geleider in een wisselend magnetisch veld plaatst, dan wordt er een stroom in de geleider ontwikkeld. Dit is een fenomeen dat men normaal probeert te vermijden (wervelstromen of stromen van Foucault), bijvoorbeeld door dunne geïsoleerde platen te gebruiken in plaats van volle stukken ijzer in transformatoren en dergelijke. Hier gaat men wel de geinduceerde stroom gebruiken (daarom wordt de motor ook inductiemotor genoemd). De stroom produceert op zijn beurt ook een magnetisch veld die het veld van de stator gaat vervormen en de motor aanzet om te draaien. Dit geinduceerd magnetisch veld kan zeer krachtig zijn, want de stroom in de kortgesloten winding is zeer sterk.Asynchone motoren zijn gebaseerd op de ankerreaktie. De ankerreaktie moet gecompenseerd worden in dynamos en grote gelijkstroommotoren, maar wordt nuttig gebruikt in amplidynes en metadynes. Dezelfde ankerreaktie wordt in asynchrone motoren gebruikt. Deze motoren werken niet met een (electro-)magneet. De rotor is niet gemagnetiseerd, er is zelfs geen stroomtoevoer naar het anker. Het anker bestaat uit dikke koperen wikkelingen om een hoge stroom te veroorzaken (en dus ook een sterke ankerreaktie). De lussen liggen in kortsluiting (kortsluitanker). In de praktijk vormt het anker een kooi (squirrel cage rotor). Om het magnetisch veld te versterken vormt de rotor een cylinder bestaande uit dunne stalen platen, met daartussen de koperen kooi. Uitwendig lijkt de rotor op een deegrol. De deegrolmotor heeft verschillende namen: kortsluitankermotor, asynchrone motor,... Afbeelding 1: principeschema van een kortsluitanker en afbeelding 2: praktische realisatie. Het kooianker heeft schuine staven om een gelijkmatig koppel te leveren ongeacht de positie van de rotor. Het kooianker gedraagt zich als het secundair van een transfo waarvan de stator het primair is. Het wisselend magnetisch veld in de stator veroorzaakt eveneens een wisselend magnetisch veld in de rotor. Daardoor wordt er een stroom gegenereerd in de wikkelingen van de rotor. Omdat de wikkelingen in kortsluiting liggen is de stroom zeer hoog. Door de stroom in de rotorwikkelingen wordt er een magnetisch veld geproduceerd. Dit geïnduceerd magnetisch veld heeft een omgekeerde polariteit als het statorveld. Maar het statorveld is niet constant, maar draaiend, waardoor de rotor de neiging heeft het statorveld te volgen (hoe een draaiend veld geproduceerd wordt wordt later uitgelegd). De rotor zal versnellen, maar nooit synchroniseren met het statorveld. Als de rotor immers aan dezelfde snelheid als de stator draait, dan is er geen wisselend veld meer (gezien vanaf de rotor) en ontstaat er dus geen wisselend magnetisch veld meer in de rotor. De vertraging van de rotor ten opzichte van het draaiend veld is kenmerkend voor de inductiemotor; deze vertraging heet slip. Om een richtwaarde te geven: de rotor draait op 95% van de synchrone snelheid, de snelheid zakt wat als de motor zwaarder belast wordt. De effektieve snelheid hangt ook sterk af van de constructie van de rotor, en met name hoe de kortsluitringen gebouwd zijn. De stator van een inductiemotor is identiek aan die van een synchrone motor. Men kan in theorie een synchrone motor ombouwen tot een asynchrone motor (en omgekeerd) door het anker te vervangen. Synchrone motoren die een zeer zwak aanloopkoppel hebben, hebben vaak een kortsluitanker om te starten als een asynchrone motor. Eenmaal dat de rotor draait heeft het veel sterkere synchrone koppel de overhand en draait de motor op synchrone snelheid. Immers als de rotor op synchrone snelheid draait is er geen wisselend magnetisch veld meer in de rotor, en ontstaat er ook geen inductie meer. De rotor van een asynchrone motor heeft geen eigen veld: het is de ankerreaktie die het veld opwekt. Men maakt gebruik van deze eigenschap om op eenvoudige manier motoren te bouwen die op twee snelheden kunnen draaien: de poolomschakelbare motoren of dahlander motoren.
Afremmen van een asynchrone motorHet afremmen van een asynchrone motor kan op een zeer eenvoudige manier gebeuren met een gelijkspanning. De gelijkspanning wordt op de wikkelingen aangelegd, ongeveer 1/10 van de nominale spanning (hangt af van het gewenst remvermogen). Het remmen is zeer krachtig en hangt af van de rotatiesnelheid van de motor en de aangelegde spanning. In tegenstelling met een mechanische rem verslijt de electro-magnetische rem niet.De electrische rem werkt niet als mechanische rem en het is niet mogelijk de motor volledig te blokkeren. Er moet immers altijd een zekere slip zijn om inductie in de rotor te hebben. Je kan het remeffekt ervaren door een autobatterij aan te sluiten op één spoel van de motor (meet eerst de spoelweerstand en kies de spanning zodat je een stroom van 2 à 3A bereikt voor een kleine motor en tot 10A voor een motor van meer dan 100W). Hoe sneller dat de motor draait, hoe sterker dat die afgeremd wordt.
Voor- en nadelen van de asynchrone motoren
Men kan de nadelen van de inductiemotor opvangen door een ster-driehoekschakeling of een frekwentieregelaar, enkel het lager vermogen is eigen aan de motor.
KoelkastmotorMen gebruikt een asynchrone motor in koelkasten en diepvriezers. De motor wordt monofasig gevoed, maar een condensator zorgt voor een draaiveld. Met zijn relatief laag aanloopkoppel kan de motor enkel onbelast starten, dus als er geen drukverschil is aan beide kanten van de compressor.Als de motor juist gedraaid heeft, dan is er een drukverschil tussen de zuigleiding en de persleiding en kan de motor niet starten. De stroom loopt dan op en een thermische zekering onderbreekt de kring gedurende een paar minuten zodat het drukverschil kan verminderen. Bij een monofasig net heeft men geen draaiveld. Hoe men een draaiveld kan maken wordt hier uitgelegd. Het rotor bepaalt in grote mate de eigenschappen van de motor. De sleepringankermotoren worden op een andere pagina besproken. Dit is een manier om de hoge aanloopstroom van de motor te beperken. De dahlander motor (een kortsluitankermotor die op twee snelheden kan draaien) wordt op een volgende pagina besproken. | ||||||||

Publicités - Reklame