Le groupe Ward Leonard a été utilisé après la seconde guerre mondiale pour commander les grands ascenseurs (grands magasins, gratte ciel, charbonnages, etc).
Ce groupe permettait une commande très souple toute en douceur.
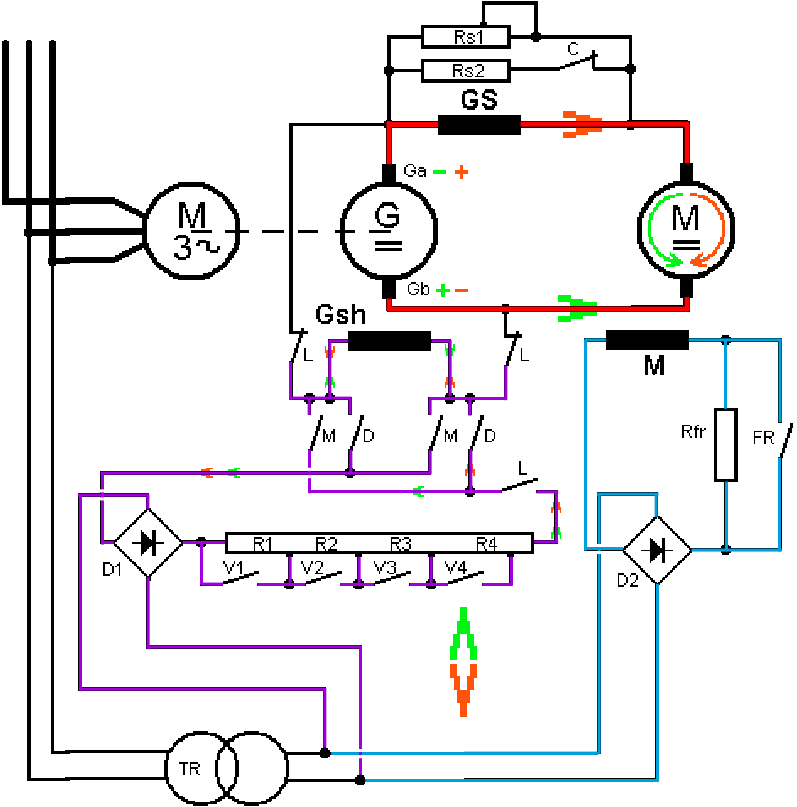
L'installation se compose d'un moteur triphasé qui entraine une dynamo. Le moteur est mis en fonction dès que l'ascenseur doit être disponible. On peut tout aussi bien utiliser un moteur synchrone qu'asynchrone.
La dynamo G a une excitation série et parallèle (GS, partie en mauve et Gsh, partie en bleu). Le moteur à courant continu a une excitation indépendante M.
Un transfo TR permet de rabaisser la tension d'alimentation à la valeur correcte pour l'excitation. On peut éventuellement utiliser un transfo et un redresseur triphasé pour les installations importantes. Avant la seconde guerre mondiale, on utilisait ici une seconde dynamo pour fournir toutes les tensions d'excitation.
Le schéma est dessiné en position de repos.
Repos:
Via les contacts L la tension développée à la dynamo est envoyée à la bobine d'exciation shunt, mais la polarité est inverse, ce qui fait que la courant annule le champ magnétique au lieu de le renforcer. La tension de sortie de la dynamo devient ainsi nulle. On est ainsi sûr que le moteur ne va pas se mettre à tourner.
Montée:
Les contacts L sont commutés et les contacts M et FR sont fermés.
La dynamo reçoit un courant d'excitation et produit une tension qui est envoyée au moteur.
Le contact FR produit une sur-excitation du moteur pendant la montée en régime ce qui lui permet de fournir un couple plus important.
Les contacts de vitesse V sont cours-circuités les uns après les autres ce qui augmente l'excitation et donc la tension à la sortie de la dynamo. Le moteur tourne de plus en plus vite.
Quand la vitesse nominale est presque atteinte, le contact FR s'ouvre et permet au moteur d'atteindre sa vitesse nominale.
Quand le moteur est chargé plus fort et que sa vitesse diminue, la force contre-électromotrice qu'il produit devient plus faible. Le courant dans le moteur augmente, ainsi que le courant dans le bobinage d'excitation série GS. La tension augmente et le moteur se met à tourner plus vite.
L'ajustement le la résistance Rs1 permet d'avoir un fonctionnement stable avec une vitesse qui reste pratiquement constante quelle que soit la charge.
Ralentissement:
Le contact Fr se ferme, provoquant une surexcitation. Sa vitesse diminue, mais le couple disponible augmente.
Les contacts de vitesse V s'ouvrent les uns après les autres, augmentant la résistance de l'excitation shunt. L'excitation de la dynamo diminue, ainsi que sa tension. Le moteur ralentit.
Finalement le contact M s'ouvre éliminant l'excitation, tandis que les contacts L s'inversent, détruisant le champ rémanent de la dynamo qui ne produit plus aucun courant.
Descente:
Le fonctionnement est identique, mais c'est le contact D qui est fermé au lieu du contact M. Le champ magnétique dans la dynamo est inversé, produisant une tension inverse. le moteur tourne dans l'autre sens.
Correction de la position:
Quand on charge ou décharge la cage, celle-ci a tendance a se déplacer (élasticité des filins de la cage). Pour rectifier la position de la cage, il faut une vitesse très faible, mais avec un couple maximal. Le contact C est ouvert, provoquant une surcompensation de la dynamo (qui réagit plus énergiquement aux changements de couple du moteur). Le contact FR est fermé pour augmenter l'excitation (et le couple) du moteur. La vitesse mainimale est enclenchée pendant la correction.
Le champ magnétique s'établit et diminue avec un retard par rapport au courant d'excitation (contacts V), ce qui produit une modification progressive de la vitesse du moteur. Le moteur réagit souplement aux variations de la charge.
Le frein mécanique fonctionne simultanément avec le relais qui commande les contacts L.
Freinage régénératif
Il est possible de récupérer l'énergie du freinage et de l'envoyer à nouveau dans le réseau, que le moteur soit un moteur synchrone ou asynchrone. En cas de moteur synchrone, le moteur se comporte comme alternateur, tandis qu'un moteur asynchrone va fonctionner en générateur hypersynchrone.
En général on va utiliser un moteur asynchrone qui est plus simple (pas d'anneaux et de contacts) et qui a une courbe de couple plus interessante. La vitesse du moteur.dynamo peut varier selon que le moteur travaille en moteur (hyposynchrone) ou en générateur (hypersynchrone).
L'avantage du Ward Léonard, en plus de sa grande souplesse d'utilisation, permet l'utilisation de contacteurs de faible calibre (seul le courant d'excitation est commuté). Il en va ainsi pour toutes les fonctions, et même le changement du sens de rotation ne nécessite qu'un contact de capacité normale.
|