-
|
Après une page d'introduction sur les groupes Ward Leonard, voici un exemple concret de schéma électrique. Il s'agit de la commande du moteur électrique de propulsion d'un remorqueur construit dans les années 1955-1960. Un remorqueur doit avoir une poussée réglable. Bon nombre de remorqueurs n'ont pas d'hélice classique, mais un système de propulsion Voith Schneider qui permet au navire de maneuvrer très précisément.
Le schéma provient du A950 Valcke et A998 Ekster deux navires auxiliaires de la marine belge. Ces navires ont été mis à l'eau en 1960 sous le nom de Steenbank et Schouwenbank et ont été repris en 1980 par la marine.
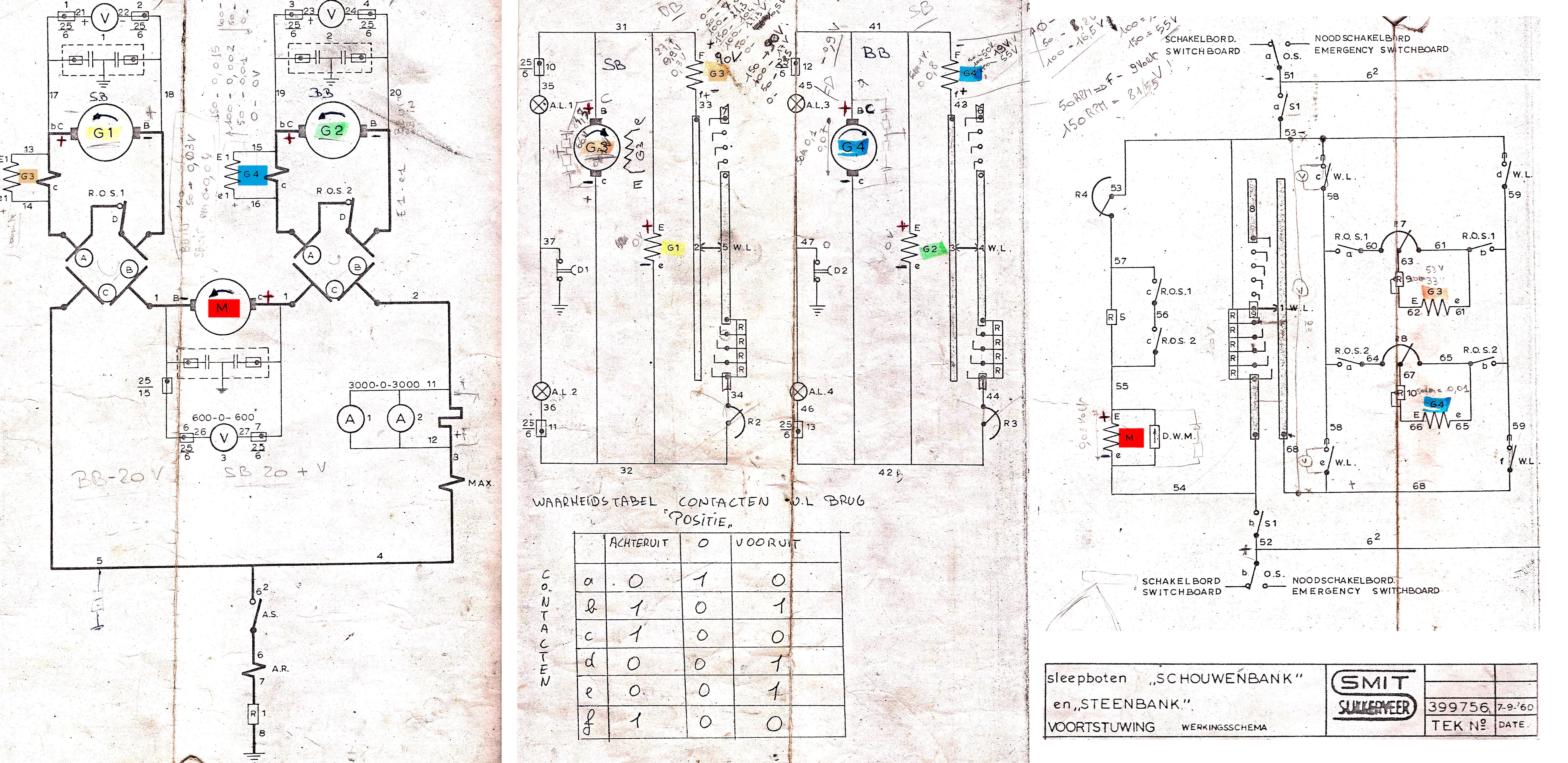 Le remorqueur dispose de deux moteurs diésel qui entrainent chacun 3 dynamos: deux dynamos de puissance et deux dynamos d'excitation (indiquées G1 à G4 sur le schéma). Les deux dynamos de puissance sont identiques, ainsi que les deux dynamos d'excitation. La construction double permet de réduire facilement la puissance du moteur à 50% en utilisant qu'une des deux dynamos. Il y a également deux dynamos fournissant l'alimentation de bord, ces dynamos ne sont pas reprises sur le schéma.
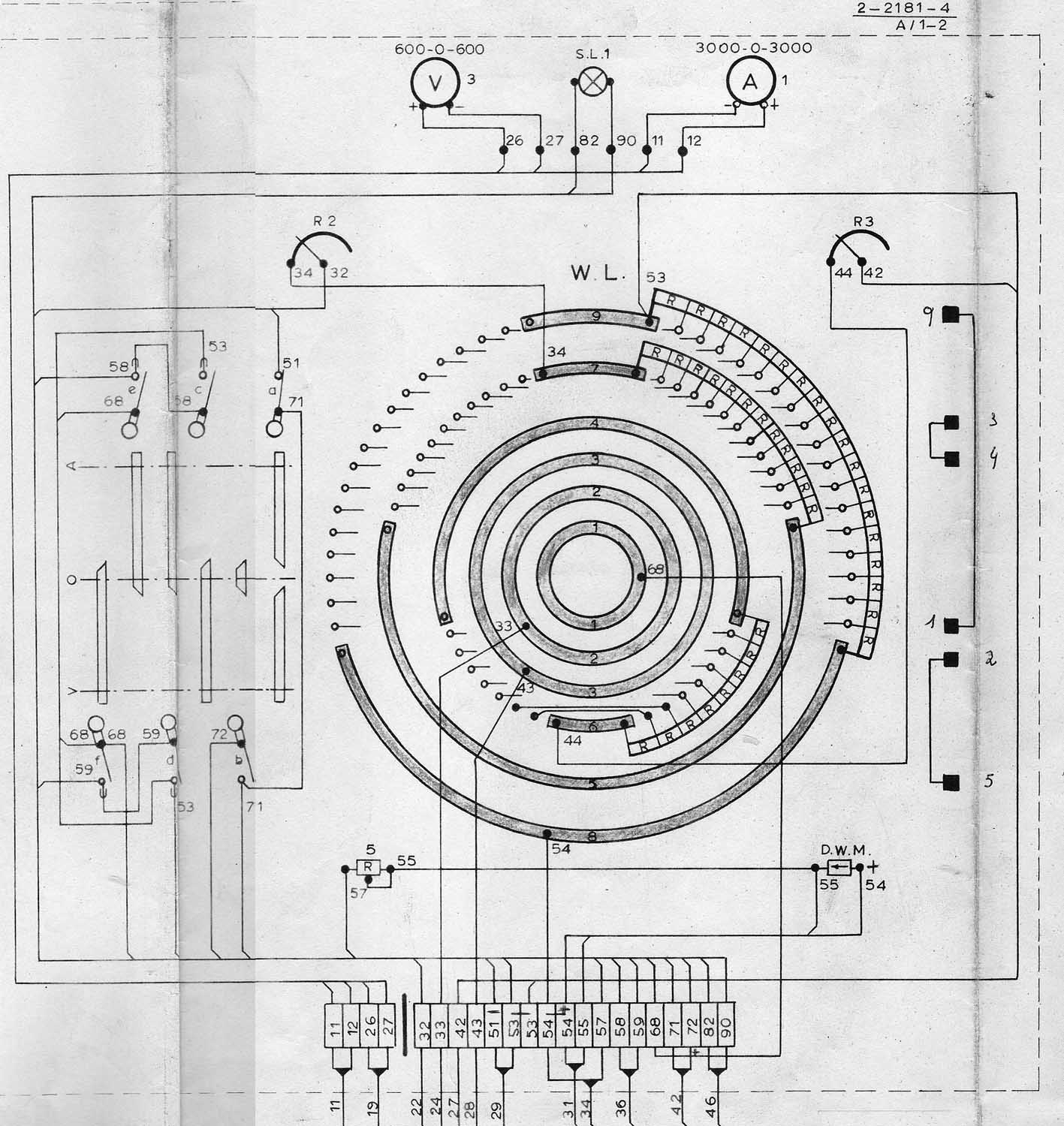
Excitation 1Le schéma se lit de droite à gauche.L'alimentation de bord est de 220V continu, le remorqueur est équipé de deux dynamos de bord et d'un banc de batteries. Le courant pour l'excitation des dynamos d'excitation et le courant d'excitation du moteur est prélevé sur le réseau continu. Ce sont les bobines G3 E-e, G4 E-e et M E-e. Le courant d'excitation des dynamos est variable pour les manœuvres (basses vitesses). Pour les vitesses plus élevées, le courant d'excitation est gardé à une valeur maximale (résistance hors fonction). Le sens de rotation du moteur est déterminé uniquement par le sens du champ magnétique injecté via l'excitation externe. Il y a en plus trois rhéostats pour régler plus finement le courant d'excitation des dynamos. Ces rhéostats sont réglés à quai et ne sont plus modifiés pendant la croisière.
Excitation 2Partie centrale du schéma.Les dynamos d'excitation fournissent principalement le courant pour l'excitation des dynamos de puissance. A marche normale, le courant d'excitation des dynamos d'excitation est réglé par un bobinage shunt qui reçoit plus ou moins de courant. Aux basses vitesses, la valeur maximale de la résistance est utilisée et la puissance est réglée via l'excitation 1. Ici aussi il y a deux rhéostats qui sont utilisés pour l'équilibrage.
Dynamos de puissancePartie gauche du schéma.Les dynamos de puissance alimentent le moteur via un contacteur qui met soit l'une dynamo, soit l'autre en fonction. Il est également possible de mettre les deux dynamos en série pour plus de puissance. Pour obtenir un fonctionnement compound (shunt et série), une partie du courant de sortie de la dynamo de puissance est prélevé et envoyé à la dynamo d'excitation. Cela n'a en effet aucun sens de prélever le courant série sur la dynamo d'excitation même, puisque celle-ci fournit toujours un courant constant car sa charge est fixe (bobinage de champ de la dynamo de puissance). On aurait pu utiliser un bobinage série sur la dynamo de puissance, mais on a préféré régler le fonctionnement compound via la dynamo d'excitation qui nécessite un courant de commande bien moins important.
Dynamos d'excitationLes dynamos d'excitation recoivent une excitation triple:
Voici les paramètres des dynamos et moteurs:


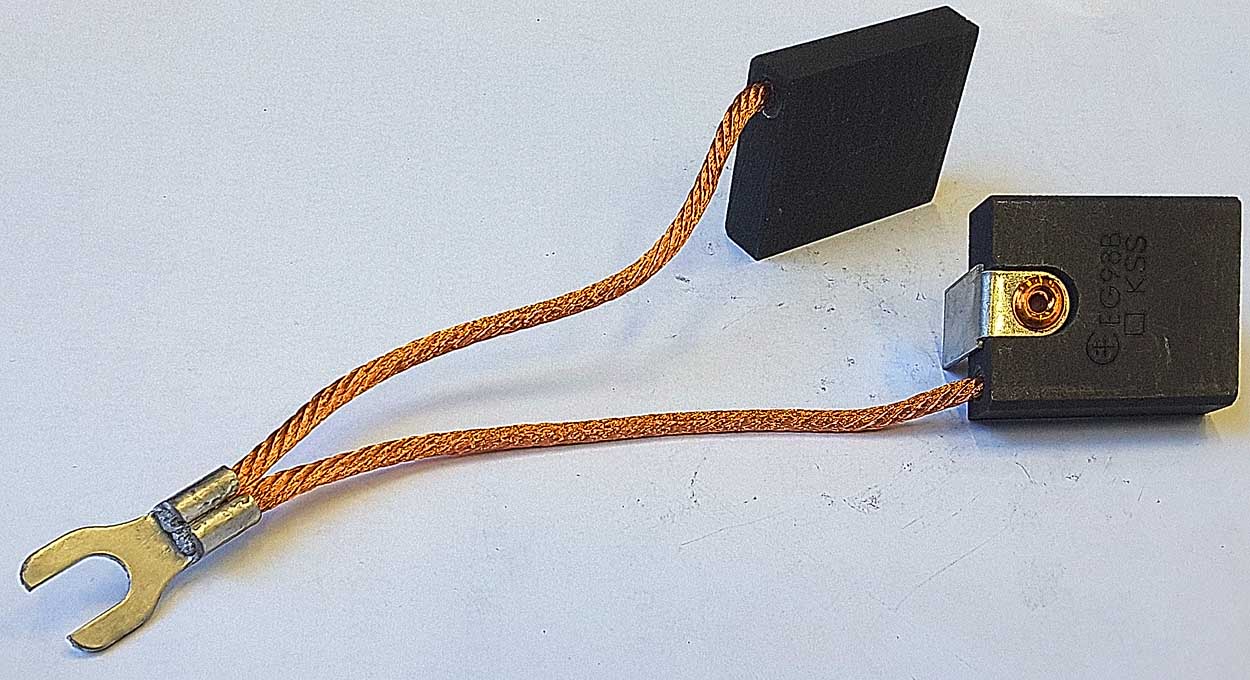
Il est possible avec une puissance de 77W (excitation de la dynamo amplificatrice) de commander une puissance de 380kW. Comme pratiquement toutes les dynamos, les deux dynamos de puissance doivent être compensées (voir les explications sur la page des dynamos). Le moteur doit également être compensé. Cette mesure est moins nécessaire pour les dynamos d'excitation dont le courant délivré est pratiquement constant. Le schéma ne reprend pas les poles de compensation pour ne pas l'alourdir. Le moteur diésel tourne toujours à une vitesse stable qui est la vitesse où son rendement est le meilleur. Les dynamos de puissance prélèvent une puissance mécanique plus ou moins élevée selon la puissance qu'elles ont à fournir (selon le courant d'excitation). La puissance transmise au moteur électrique est de plus de 1MW. Le système Ward-Leonard permet de régler la puissance fournie au moteur dans une très large plage, tout en utilisant des résistances et des rhéostats de petite dimension. On ne règle en effet pas directement le courant d'excitation de la dynamo principale, mais de la dynamo d'excitation. La dynamo d'excitation fonctionne comme amplificateur magnétique. Les résistances dissipent en effet une puissance de 0.05% de la puissance fournie au moteur. Le seul point négatif de ce système est l'utilisation de dynamos et de moteurs à courant continu que demandent un entretien régulier. Le frottement des balais produit en plus des pertes mécaniques. A droite: un des charbons de la dynamo (ou du moteur). Il y en a plus d'une centaine pour un courant total de 1730A. Charque charbon a une surface de contact de 8mm de large pour une longeur de 40mm.
Ward Leonard pour ascenseursUn schéma pratiquement identique peut être utilisé pour la commande des moteurs d'ascenseurs dans les charbonnages. Les positions basse vitesse sont utilisées pour positionner les cages, tandis que les positions haute vitesse servent à envoyer les cages au fond et à remonter le charbon (distance de plus de 1000m). L'énergie est fournie par un moteur synchrone au lieu d'un mteur diésel, ce qui permet un freinage régénératif (on envoie la puissance récupérée dans le réseau). Le moteur synchrone fonctionne alors en alternateur.Comme la puissance nécessaire est moindre, on peut se passer d'une dynamo, la dynamo d'excitation fournissant l'excitation aux deux dynamos et au moteur. Un schémo de groupe Ward Leonard pour la commande d'ascenseurs se trouve ici. |
Publicités - Reklame