-
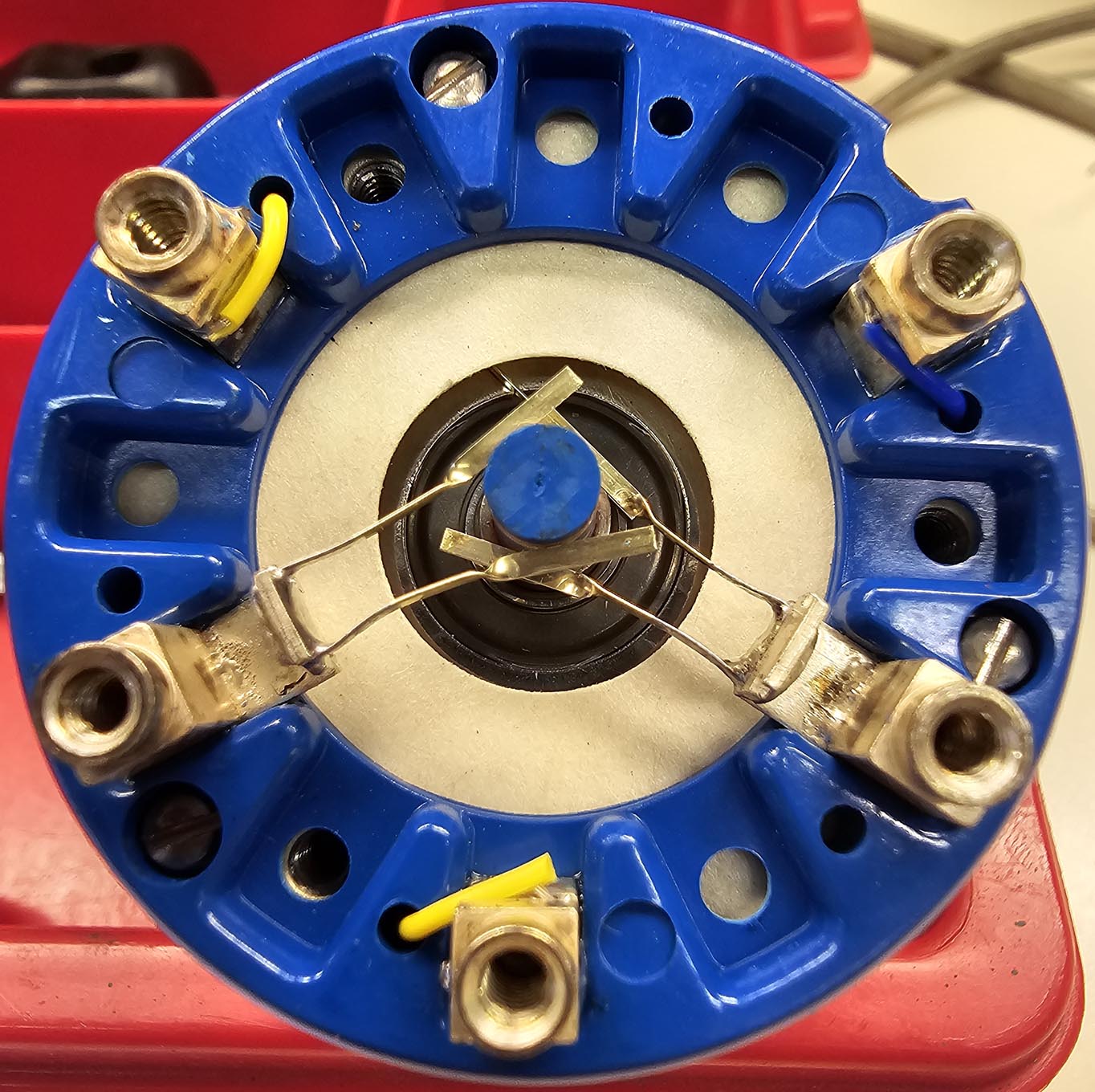
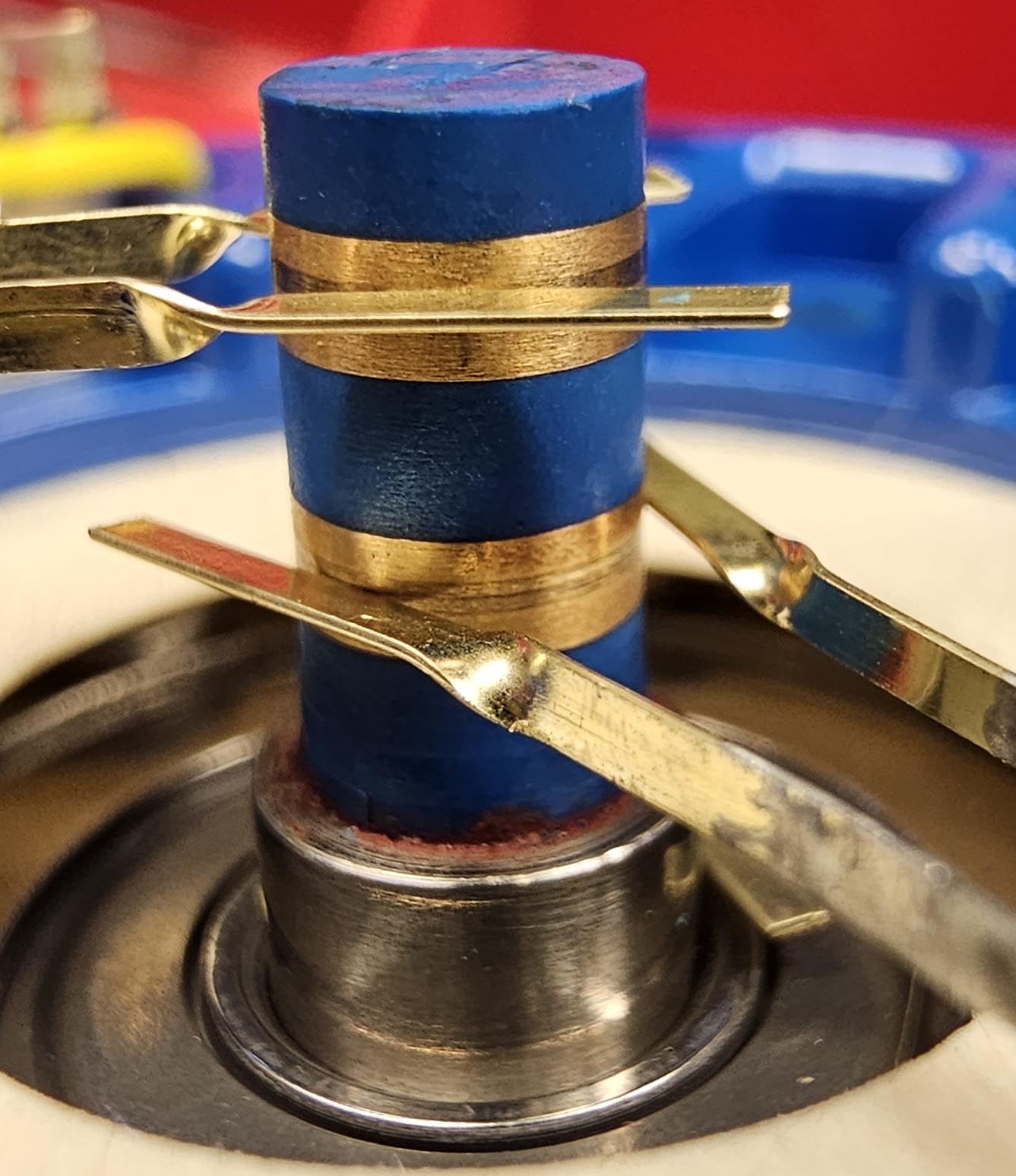
SynchroLe stator est composé de trois bobinages et le signal en sortie dépend de la position du rotor. Quand le rotor tourne, le signal produit est une tension triphasée dont l'ondulation dépend de la vitesse de rotation. L'amplitude maximale du signal entre phases (tension combinée) est de 90V (systèmes en 115V) ou 11.8V (systèmes en 26V). Le synchro peut être comparé à un alternateur triphasé de faible puissance (mais qui produit un signal sinusoidal avec une très faible distorsion). L'alimentation est transmise au rotor via des bagues de contact. On utilise actuellement un transfo rotatif pour transmettre l'énergie au rotor car il ne nécessite pas de contacts (moins d'usure et moins de frottement). Le transfo rotatif était utilisé dans tous les magnétoscopes pour transmettre le signal des têtes vidéo (montées sur un disque) à l'électronique (voir photo à droite).
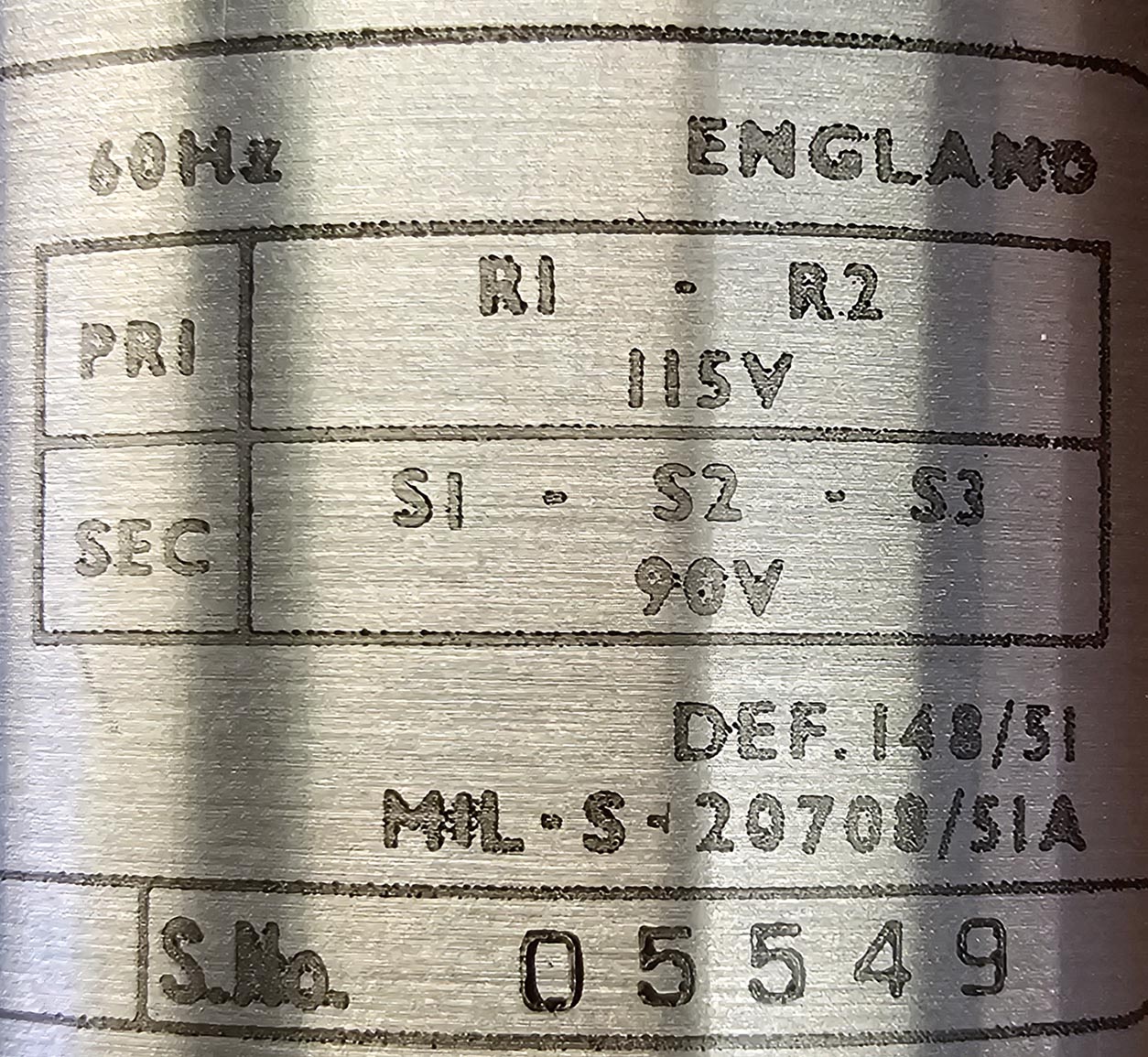
La tension d'alimentation est de 115V 60Hz (applications terrestres), mais il existe également des synchros travaillant sous 400Hz (applications militaires et aéronautiques). Cette tension est envoyée au rotor. La tension au secondaire est de 90V, le stator a trois bobinages (montés en étoile ou triangle cela ne joue aucun rôle car il n'y a pas de neutre).
Il y a normalement un transmetteur qui envoie le signal et un ou plusieurs récepteurs, mais si le transmetteur peut tourner librement et qu'on fait tourner un des récepteurs, celui-ci se transformera en émetteur et transmettra le signal de rotation aux autres synchros. Le transmetteur est généralement plus grand que les récepteurs, mais autrement il n'y a aucune différence mécanique ou électrique entre un transmetteur et un récepteur. Le synchro n'est pas destiné à produire un fort couple, il peut commander l'aiguille d'un afficheur ou modifier la position d'un servo (électrique ou hydraulique). Le récepteur se tourne automatiquement dans la position où le courant statorique est le moindre (juxtaposition), c'est à dire quand les deux synchros sont tournés dans la même position. Utilisations pratiques:
u(S3S2) = n * u(R2R1) * sin(α + 120)
n: rapport de transformation Ces formules ne sont d'application que si le synchro tourne à une vitesse bien inférieure à la fréquence du réseau. La vitesse de rotation limite pour un synchro alimenté en 50Hz est d'environ 100 tours par minute pour éviter un décrochage. De par leur très grande fiabilité, les synchros sont encore utilisés dans des applications critiques (mesure de l'angle des vannes (centrales nucléaires, missiles,...), applications militaires, nautiques et aériennes,...).
SelsynLe selsyn (self synchronising) est le nom donné à l'ensemble des deux (ou plusieurs) synchros. Un dispositif à retour de force peut être réalisé avec deux synchros identiques. Quand on agit sur un synchro, celui-ci agit en transmetteur et transmet l'impulsion au second synchro. Le second synchro envoie en retour la résistance mécanique (freinage).Le couple qu'un selsyn peut transmettre est limité parce que le couple diminue au fur et à mesure que les synchros ont un angle qui se rapproche. Plus le couple à vaincre est important, et plus l'erreur (différence d'angle entre émetteur et récepteur) devient importante. S'il faut commander des charges plus importantes, on utilise un asservissement qui va amplifier le signal d'erreur pour commander un moteur qui corrige la position du récepteur jusqu'à ce que les deux synchros soient en juxtaposition. Ce n'est alors plus un selsyn mais un servo. Les synchros qui sont utilisés pour commander mécaniquement un indicateur (ou une autre charge légère) sont appellés torque transmitter, tandis que les synchros utilisés pour produire un signal électrique sont appellés control transmitter. Un "transmetteur de couple" (plus puissant) peut être utilisé à la place d'un "transmetteur de controle", mais pas l'inverse. Le transmetteur de controle peut être utilisé pour envoyer un signal à un servo. |
Publicités - Reklame