-
Asservissement (servo)
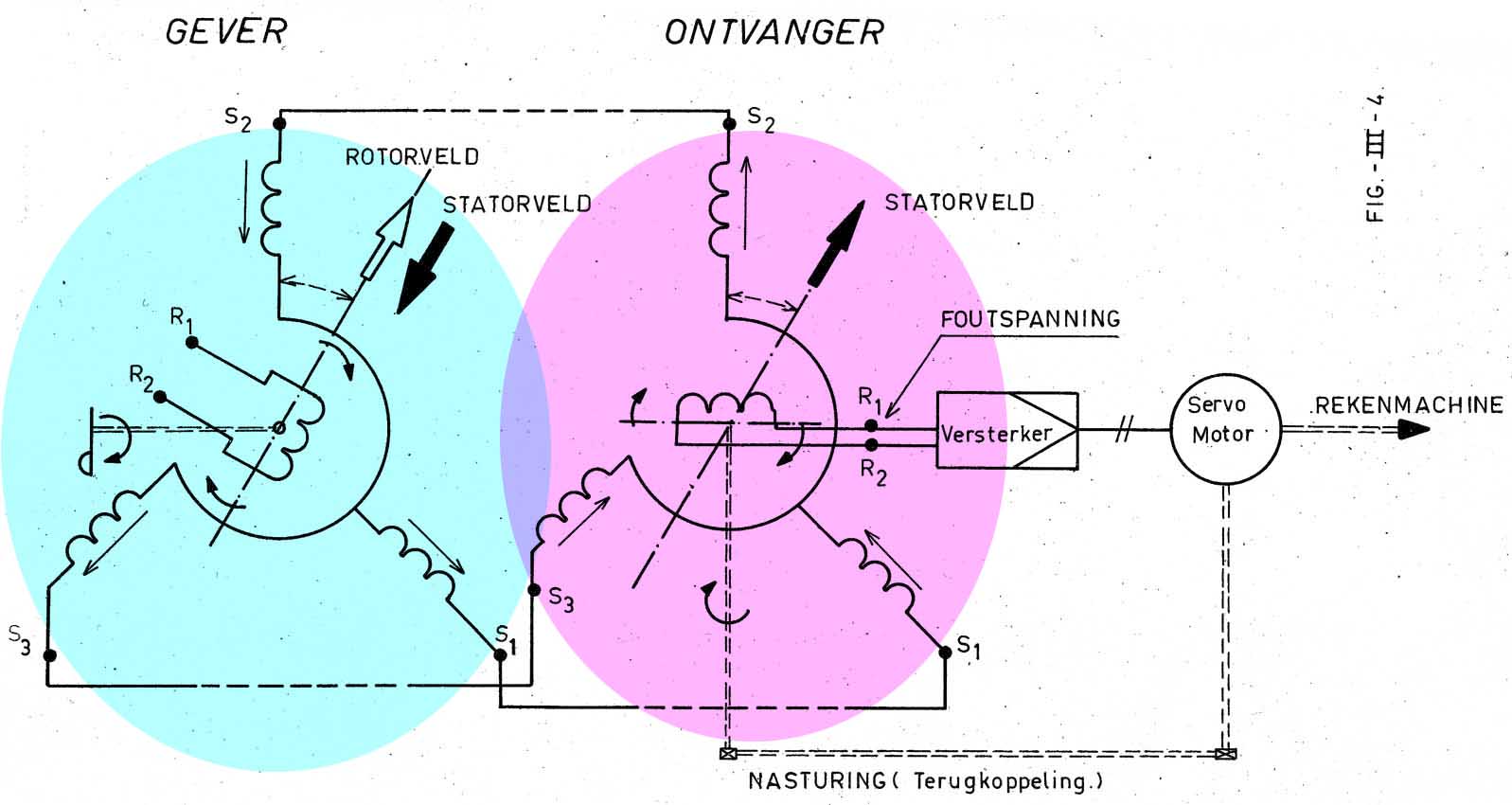
Le selsyn est donc utile pour commander l'aiguille d'un répétiteur, mais pas pour diriger un canon. Au lieu de produire un signal mécanique, un synchro peut également produire un signal électrique (synchro comparateur). Ce signal électrique est détecté par un démodulateur synchrone commandé par le signal de référence. Le démodulateur synchrone reçoit sur une entrée le signal de référence et sur son autre entrée le signal "control transformer rotor output" (voir schéma à droite). On obtient un signal positif ou négatif selon que l'erreur (différence d'angle entre le premier et le second synchro) est positive ou négative. Le synchro comparateur (control synchro) a un bobinage au stator composé de plus de spires d'un fil plus fin pour obtenir une tension plus élevée avec un angle donné. Si une précision élevée est nécessaire (répétiteur de gyrocompas) on utilise un asservissement où on compare la position du transmetteur (gyrocompas maitre) à la position de l'aiguille sur le gyrocompas répétiteur. Le signal de différence est amplifié et commande un petit moteur, c'est le second schéma à droite. Notez que l'amplificateur (versterker) doit être précédé d'un démodulateur synchrone.
Le premier synchro affiche la valeur de consigne, par exemple l'élévation ou l'azimuth demandé d'un canon (dans l'exemple il s'agit de l'azimuth) tandis que le second synchro indique la valeur effective (azimuth actuel). Le signal électrique de faible puissance est envoyé à un amplistat ou amplidyne (différents types d'amplificateurs magnétiques, on utilise souvent un amplistat suivi d'un amplidyne). On n'utilise évidemment plus d'amplidynes actuellement, le signal est amplifié électroniquement et envoyé à des transistors de puissance qui commandent le moteur.
Torque Differential Transmitter
Le TDX existe également en version CDX (control differential transmitter, signal électrique en sortie) moins courant, mais de toute façon le TDX et CDX ne sont pratiquement plus utilisés. |
Publicités - Reklame