-
|
Les résolveurs étaient utilisés comme calculateurs analogiques avant l'apparition des vraies machines à calculer et des ordinateur fiables. Les résolveurs font partie de la grande famille des synchros utilisés dans de nombreuses applications. Les synchros sont encore toujours utilisés dans des applications pointues à cause de leur très grande fiabilité.
Pendant et après la guerre, les navires étaient protégés par le deperming, la réduction de la signature magnétique d'un navire. Cela était jugé suffisant pour les navires qui suivaient les routes sûres, mais pas pour les dragueurs de mines qui devaient aller à la recherche des mines. Le sonar était très rudimentaire et ne pouvait pas localiser les mines sur le fond marin. Il était donc de la plus grande importance que les navires ne puissent pas être détectés par les mines magnétiques. L'installation devait être particulièrement fiable et fonctionner par tous les temps. On ne disposait pas à l'époque d'amplificateurs transistorisés et de sondes magnétiques ni d'ordinateurs pouvant calculer en temps réel le courant à appliquer aux boucles d'immunisation. Les premiers dragueurs de mines étaient en fait des navires de pêche en bois transformés. Un navire a un champ magnétique permanent: tous les matériaux ferro-magnétiques se magnétisent à la longue et produisent un léger champ magnétique. Le magnétisme permanent peut être compensé aisément par un courant électrique qui produit un champ inverse. Le courant doit régulièrement être controlé, car le champ magnétique permanent peut varier à la longue. Le navire a également un champ mégnétique induit: c'est la déformation du champ magnétique terrestre par les métaux présents dans le navire. Le magnétisme induit dépend du champ magnétique terrestre local et ne peut pas être corrigé par un courant constant. Un magnétomètre était à l'époque un appareil trop complexe et pas assez fiable pour pouvoir être utilisé sur des navires en mer. Il fallait donc introduire manuellement le champ magnétique local dans le système d'immunisation. Les valeurs étaient heureusement valables pour une zone assez large et les valeurs ne devaient être introduites qu'une fois lors de la mise en marche du système. Il fallait utiliser trois cartes: une carte reprenant la composante verticale du champ magnétique, une carte pour la composante horizontale et une carte des déclinaisons pour les marins qui voulaient apprendre le latin en mer. Non, je plaisante bien sûr, la déclinaison c'est la différence entre le nord magnétique et le nord vrai (indiqué par le gyrocompas) Le champ magnétique horizontal a évidemment un autre effet sur le navire selon qu'il vogue vers le nord ou vers l'est. La correction doit être effectuée par d'autres boucles. Le champ vertical restant constant, le courant est ici constant. Le gîte du navire joue également un rôle, un rôle pratiquement aussi important que le cap suivi. Cette information doit donc également être envoyée à l'armoire d'immunisation.
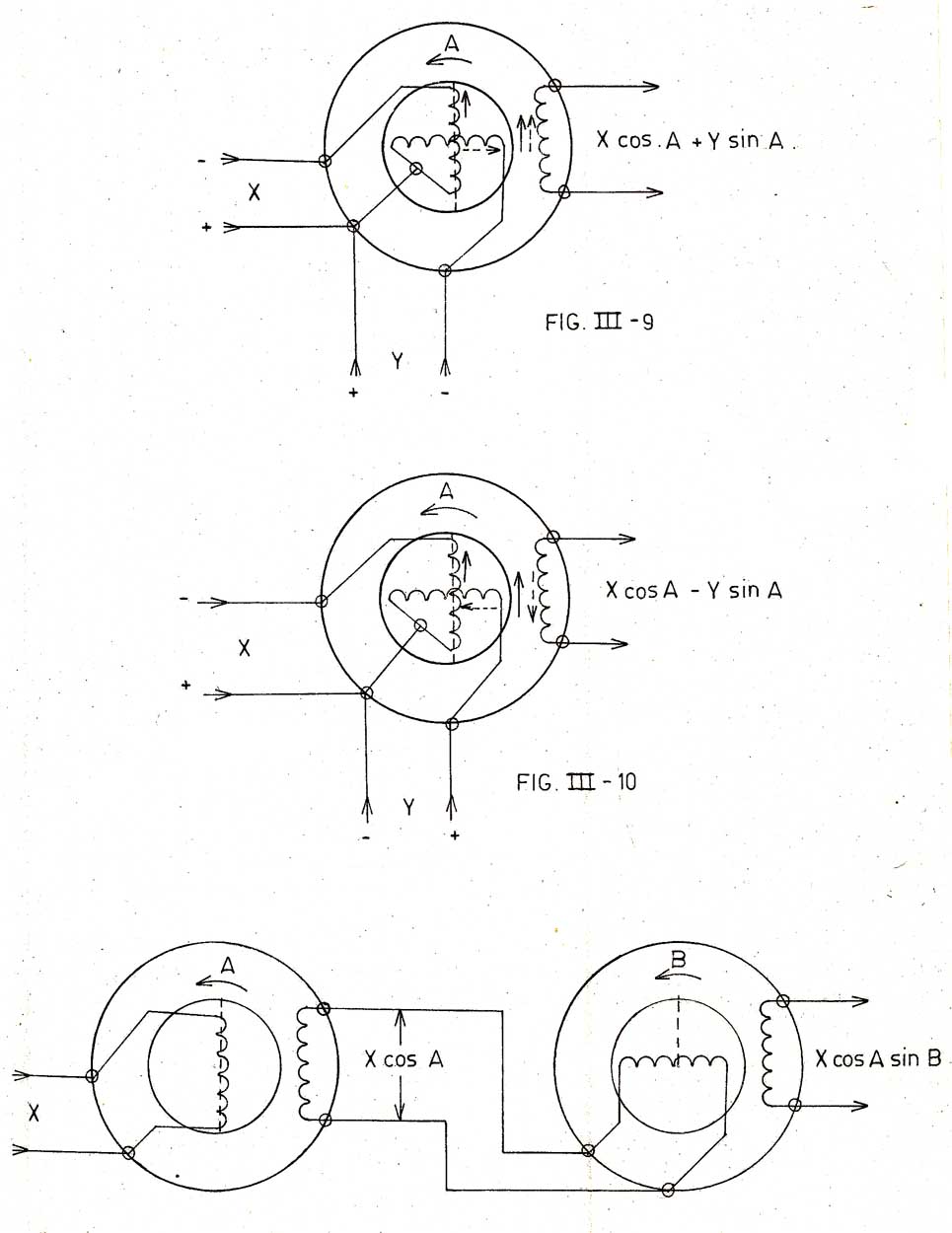
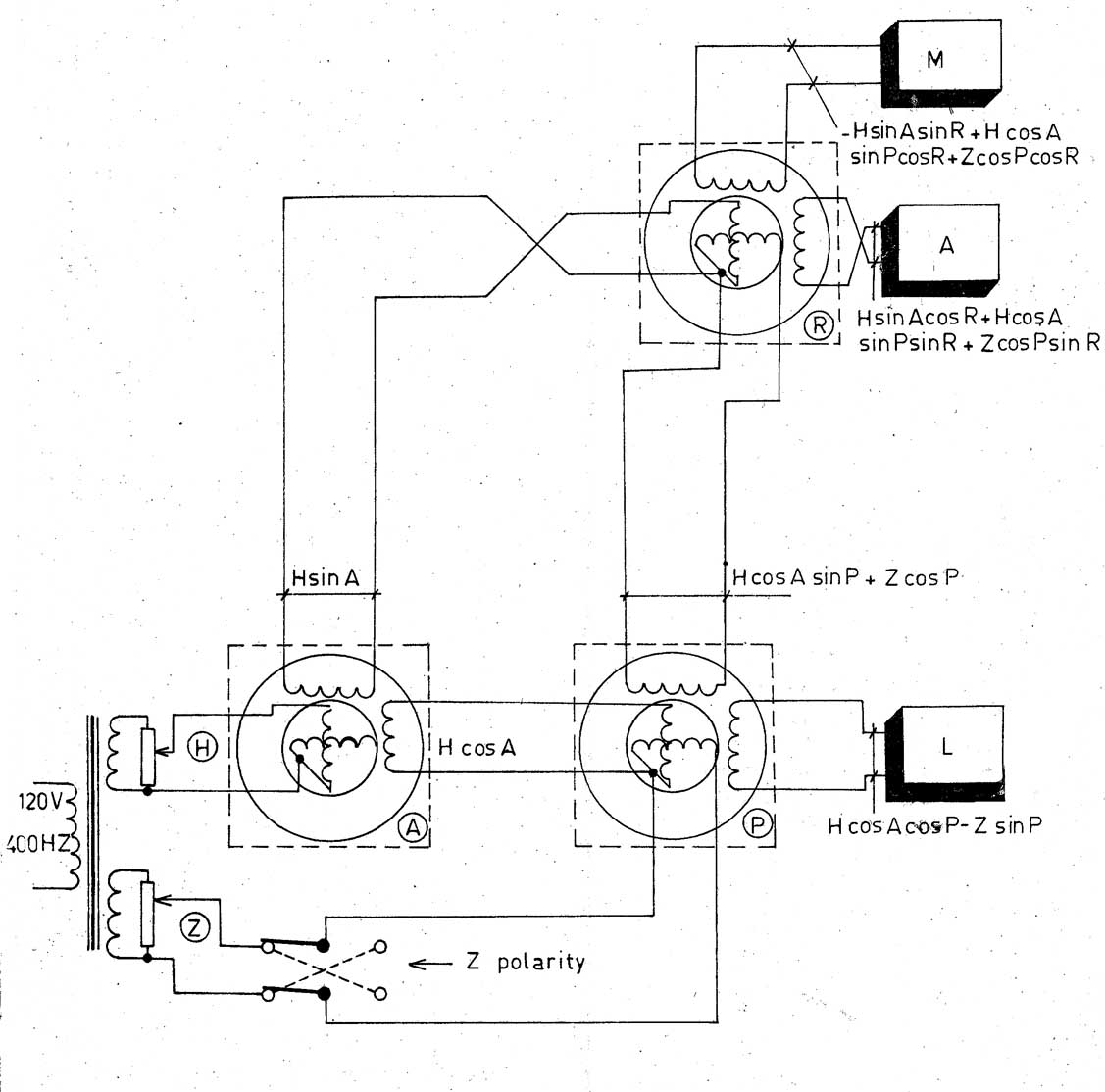
Le résolveur est en fait un transformateur variable, c'est pour cela qu'il doit être alimenté en alternatif (souvent du 400Hz qui permet une réponse plus rapide et des synchros plus petits). L'utilisation d'un transformateur avec bobinages en sortie isolés permet de faire différents montages. On additionne ou soustrait deux valeurs en mettant les bobinages secondaire en série. la multiplication est effectuée en placant deux résolveurs l'un après l'autre. Le rotor peut être tourné (à la main ou via un selsyn) et le signal en sortie est le sinus ou le cosinus de l'angle multiplié par le signal en entrée. Le selsyn transmet l'angle d'un gyrocompas ou d'un autre appareil de façon électrique, pour le retransformer en commande mécanique à l'arrivée. Notre installation d'immunisation a donc besoin des signaux suivants:
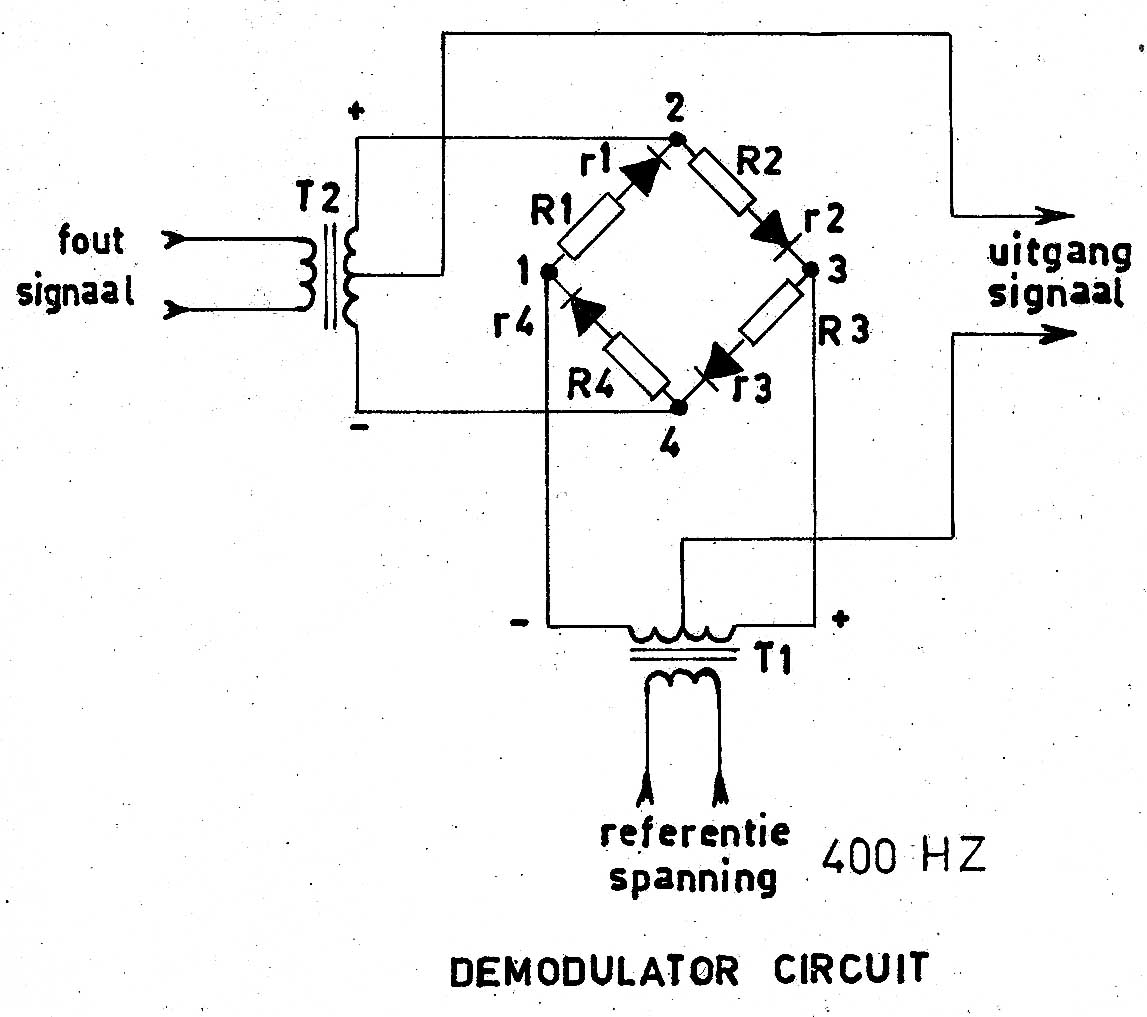
Le signal de notre calculateur est le signal à appliquer aux boucles d'immunisation: la boucle principale (placée horizontalement) qui corrige le champ magnétique vertical, la boucle A (placée longitudinalement) et la boucle L (placée en largeur). Mais c'est un peu trop simple et nous devons d'abord résoudre deux problèmes. Tout d'abord, nous travaillons avec de l'alternatif, qui est nécessaire pour pouvoir utiliser des résolveurs. L'information se trouve dans la phase du signal (par rapport au signal de référence) et son amplitude. Il nous faut donc un détecteur synchronisé avec le signal de référence. Le démodulateur synchrone produit une tension continue dont la polarité correspond à la phase du signal. Notre démodulateur produit un signal très faible, tout au plus quelques milliampères, alors qu'il faut envoyer plusieurs ampères dans les boucles. Les amplificateurs électroniques (à tubes) ne pouvaient pas être utilisés, la puissance à fournir en continu ne pouvait pas être atteinte. Pour amplifier le signal, nous allons tout d'abord utiliser un amplistat (amplificateur magnétique) suivi d'un amplidyne (une dynamo spéciale conçue pour amplifier les signaux). Les dragueurs de mines opérant dans les eaux peu profondes utilisent une autre installation (MSI: Mine Sweeper Inshore). Le champ magnétique local peut être très différent à cause de constructions métalliques: quais, ponts, épaves, etc. Il faut utiliser un magnétomètre qui mesure le champ magnétique local. On peut éliminer tout le calculateur quand on utilise un magnétomètre, car il mesure le champ magnétique effectif et tient compte du roulis, du tanguage et du cap. Le signal du magnétomètre est simplement amplifié (ici aussi par trois amplidynes) pour alimenter les boucles d'immunisation. Dans une version suivante, on tiendra compte du fait que le navire n'est pas un tout homogène, mais se compose de parties plus ou moins métalliques. On place des boucles locales autour des gros moteurs, de l'ancre, des groupes électrogènes, etc. Les mines magnétiques sont devenues plus perfectionnées et il faut donc que la signature magnétique d'un navire soit moins visible. Et maintenant (donc en fait à partir des années 1980...) on utilise des navires avec gouvernails actifs (équipés d'un moteur de propulsion électrique). Ces moteurs doivent naturellement être immunisés, mais on ne peut pas utiliser ici le signal du magnétomètre car le gouvernail peut tourner. Il faut donc lire la position des gouvernails (évidemment avec un résolveur) et envoyer le signal à un calculateur. On n'utilise plus de résolveurs ici, mais un calculateur électronique. |
Publicités - Reklame