-
Ecran de visualisationNous avons montré l'émetteur et le récepteur d'un radar de navigation moderne. Il nous faut encore expliquer comment ce signal est envoyé à l'écran.Plan Position IndicatorL'indication se fait actuellement via un écran scpécifique qui montre sur un plan tout ce qui se trouve autour du navire. Une cible proche du navire se trouve près du centre de l'écran, tandis qu'une cible plus éloignée se trouve plus près des bords de l'écran. Au début du radar on utilisait un oscilloscope adapté à phosphore lent. Le tracé restait visible pendant plus d'un tour de l'antenne et chaque illumination d'un point du phosphore augmentait sa luminosité.Le phosphore utilisé a une très longue persistance pour que chaque excitation (balayage d'électrons) augmente la luminosité du point qui apparait sur l'écran. On peut ainsi réduire les parasites (gouttes de pluie, petites vagues) qui n'apparaissent jamais au même endroit. Les premiers écran de radar avaient un résolveur monté sur l'axe de l'antenne rotative. Les deux signaux étaient envoyés aux plaques de déflection X et Y de l'oscilloscope.
C'est toujours la rotation de l'antenne (plus lourde et sensible aux effets du vent) qui synchronise la rotation du moteur de déflection, jamais l'inverse. Dans notre exemple l'antenne (ainsi que la bobine de déflection) fait un tour complet toutes les trois secondes. Le signal C est le signal d'émission. Il commande le magnétron et si nécessaire le TR switch et bloque le récepteur pendant l'émission. Le temps d'émission est ici de 0.5µs et le temps de répétition de 800µs. Le signal D est le signal en dents de scie qui va faire dévier le point lumineux du centre de l'écran vers l'extérieur, selon la position de la bobine. Cela correspond un peu à la base de temps d'un oscilloscope classique, mais ici le plan horizontal est en rotation constante et il n'y a pas de déflection verticale mais une modulation du pinceau d'électrons comme dans une télévision. Le signal de l'antenne radar, amplifié et détecté est d'ailleurs appellé signal vidéo, comme dans une télévision analogique. Dans notre exemple, avec une fréquence de répétition de l'émission (PRF) de 800µs on a une fréquence des dents de scie de 1250Hz. Le signal E est le signal vidéo qui va être envoyé au wehnelt qui va moduler le point lumineux (modulation Z dans les oscilloscopes). Le récepteur est totalement bloqué pendant l'émission. Ce bloquage total est nécessaire pour éviter la saturation de l'ampli. C'est le creux dans la courbe E. Pendant la réception, ce signal montre les échos reçus par l'antenne. Plus l'écho apparait rapidement après l'émission, et plus la cible est proche. Les signaux très faibles ne sont pas montrés sur l'oscilloscope, ils sont noyés dans le bruit de fond. Ce signal est un signal déjà corrigé (controle automatique du gain). Il adapte automatiquement le gain de l'ampli pour avoir un niveau de bruit de fond constant. Il est ainsi possible d'adapter automatiquement l'amplification aux conditions atmosphériques (pluie, vagues,...). Ce systèem tient également compte que les échos de cibles proches sont plus puissants. Les signaux qui dépassent du niveau moyen du bruit de fond (stabilisé) font apparaitre un point sur l'écran de l'oscilloscope. Plus tard on s'est passé du moteur asservi à la rotation de l'antenne et on utilise des bobines de déflection classiques comme dans une télévision. Le top de proue synchronise un oscillateur qui produit un sinus et un cosinus. Ce sinus et cosinus permettent de dessiner un rond sur l'écran. Le sinus et le cosinus sont multipliés avec le signal en dent de scie (qui indique la déflection par rapport au centre de l'image). On a ainsi un spot
Un processeur détermine le point qui va être écrit (basé sur le signal sinus, cosinus et dent de scie) et donc la position de mémoire qui sera modifiée. La valeur de cette position est augmentée d'une valeur qui correspond au signal vidéo instantané. A chaque rotation de l'antenne, la valeur du point est augmentée si la cible se trouve toujours au même endroit, produisant un point bien lumineux au bout de quelques tours d'antenne. La lecture s'effectue ligne par ligne (comme un ancien écran de télévision ou d'ordinateur): la valeur de la position de mémoire est lue et produit un point à l'écran plus ou moins lumineux. Après cela la valeur à la position lue est très légèrement réduite: cela correspond à la persistance du point lumineux. Ce système numérique a une plus grande souplesse: il permet de mieux absorber les parasites (vagues, pluie et signaux d'autres radars) et il permet de modifier le temps de persistance, ce qui n'est pas possible avec un écran de radar analogique. Un traitement numérique est également possible: il est possible de dessiner des trainées pour indiquer la trajectoire des navires, mais on peut également prévoir la position des cibles dans la minute à venir (si le cap et la vitesse sont maintenus).
Plus tard l'écran d'ordinateur à tube cathodique a été remplacé par un écran LCD qui permet une résolution plus élevée, mais le principe de la numérisation est resté le même.
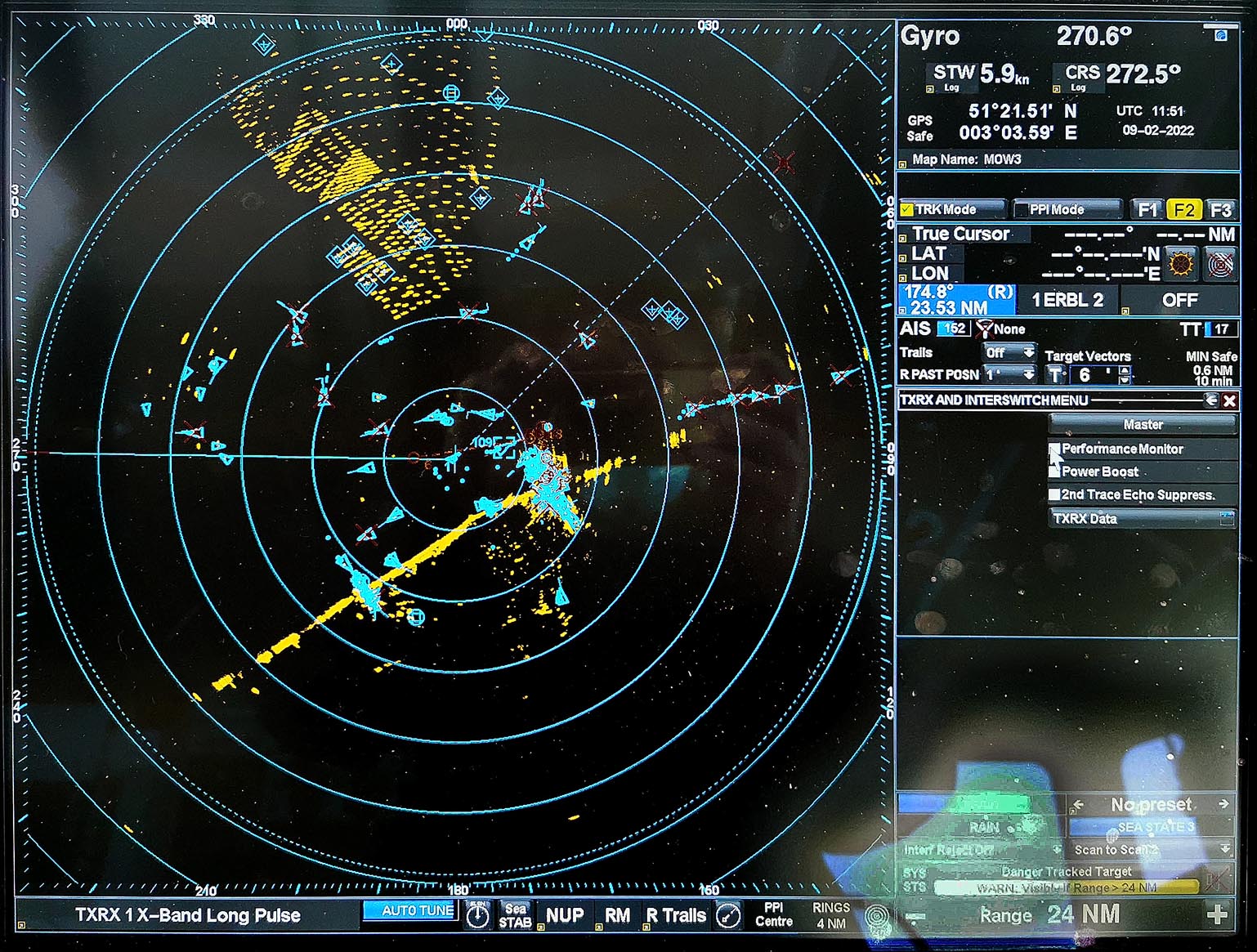
Image à droite: Les triangles cyan sont les navires identifiés par l'AIS (automatic identification system). Ce système est souvent associé au radar, bien que ce sont des systèmes différents. |
Publicités - Reklame