-
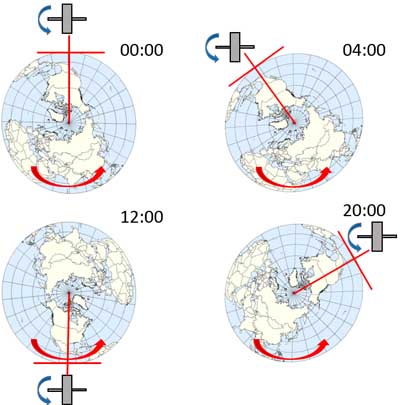
Compas gyroscopiqueLe gyroscope à tendance à garder la même inclinaison, quelle que soit la rotation de la terre. En rotation, son moment d'inertie est très élevé. Il pointe par exemple vers la même étoile. Par rapport au référentiel de la terre, le gyroscope en fonctionnement pointe vers la même direction toutes les 24 heures. Mais si le gyroscope garde son inclinaison du fait de sa très forte masse (il tourne en pratique à une vitesse entre 3.000 et 24.000 tours/minute), il n'indique pas nécessairement le nord. Il faut un "truc" pour transformer un gyroscope en gyrocompas. On va très légèrement forcer le gyroscope vers une direction donnée (en lestant le cardan pour qu'il se stabilise à l'horizontale). L'axe de rotation préférentiel du gyroscope est maintenant à l'horizontale. Si au démarrage l'axe de rotation pointe par exemple en oblique vers le haut, le petit poids va tirer l'axe de rotation vers l'horizontale. Nous venons de fixer la direction du gyroscope dans une dimension, le plan horizontal. Mais l'axe de rotation ne pointe toujours pas nécessairement vers le nord. Continuons notre explication pour l'équateur. La rotation de la terre exerce une contrainte sur le gyroscope, et cette contrainte est d'autant plus grande que l'axe de rotation du gyroscope et celui de la terre forment un angle. Supposons que l'axe de rotation pointe vers l'est ou l'ouest. Comme la terre tourne, le gyroscope a tendance à garder son inclinaison. Pour la garder, il doit faire basculer le plan qui était à l'horizontale, et donc lever le poids du cardan. Le gyroscope (axe de rotation) va se tourner de telle manière que la contrainte soit la plus faible, donc vers le nord (ou sud) géographique. En effet, quand le gyroscope pointe vers le nord ou sud, son orientation ne doit pas changer pendant la rotation de la terre autour de son axe. En conclusion, le gyrocompas aligne son angle de rotation sur celui de la terre. Cela ne se fait pas immédiatement, mais peut durer plusieurs heures en cas de mise en marche. Le phénomène physique qui fait se pointer l'axe du gyroscope vers la direction du niveau d'énergie le plus faible est comparable à celui du pendule qui termine son oscillation avec le poids au niveau le plus bas. Quand l'axe de rotation du gyroscope et de la terre ne correspondent pas, la précession à tendance à faire monter le poids. Or un système n'est stable que quand il a le niveau d'énergie potentielle le plus bas (cfr. le pendule). Soit la terre doit aligner son axe de rotation sur celui du gyroscope, soit c'est le gyroscope qui doit s'adapter. En pratique, c'est le gyroscope qui a une masse moindre que la terre qui s'aligne sur l'axe de rotation de la terre. Cet alignement est valable à l'équateur, mais se fait également sentir plus au nord ou au sud. Ici il y a deux effets qui agissent: le lest qui aligne l'angle de rotation sur le plan horizontal, et l'inertie du gyroscope qui fait aligner celui ci sur l'axe de rotation de la terre. Le résultat est que l'axe de rotation peinte vers le nord géographique. La poussée du gyrocompas est bien supérieure à celle d'un compas magnétique, mais cela ne suffit pas à commander directement les compas répétiteurs. La poussée du gyrocompas est amplifiée et transmise à un cadre extérieur qu'on dit fantôme. Ce cadre permet de guider les cables de commande qui ainsi n'ont aucun effet de poussée sur le gyrocompas même. Si le gyroscope n'est pas influencé par les masses magnétiques du navire et les erreurs de déclinaison et apporte ainsi une précision accrue (erreur inférieure à 1°), il n'est pas la panacée. En effet il nécessite plusieurs heures pour se stabiliser après sa mise en route. Il réagit mal aux brusques changements de cap ou de vitesse (il n'est pas utilisé sous cette forme dans les avions). C'est de plus un appareil mécanique de précision qui doit régulièrement être entretenu. Certains gyrocompas sont connectés à une boussole magnétique électronique (de type fluxgate) pour accélérer la stabilisation lors de la remise en route. Tant que le gyroscope n'est pas parfaitement calé vers le nord, c'est la boussole qui indique le nord. Tout comme le compas magnétique, son fonctionnement devient moins précis près des pôles, puisque l'effet de la rotation terrestre est moindre. Près des pôles, le compas gyroscopique pointe toujours vers la même direction par rapport aux étoiles. Le gyrocompas est détaillé plus précisément sur une autre page.
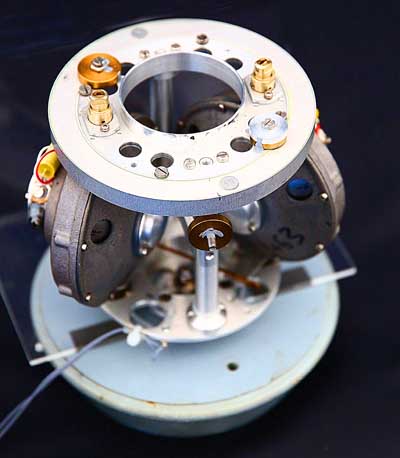
Plateforme inertielleLa plateforme inertielle est utilisée dans sa forme la plus simple dans les systèmes de navigation pour mettre la position à jour quand le signal GPS des satellites n'est pas disponible (tunnel, entre deux hauts batiments,...). Vous aurez sûrement remarqué que votre navigateur continue à indiquer la route, même sans signal GPS. La précision d'une plateforme inertielle standard est assez bonne: prenez une voiture qui circule à environ 90km/h. Au bout de 5 minutes de route (7.5km de parcouru), la dérive est de 850m. Les systèmes utilisés dans les sous-marin ont une précision nettement plus élevée: au bout de 7.5km parcourus sous eau, la dérive n'est que de 30cm. Une telle précision est nécessaire, car les sous-marins ne peuvent pas aller régulièrement en surface pour faire un recalage du système de navigation inertielle.
Navigation par satellitePour obtenir le cap, il faut un système supplémentaire qui va mesurer le temps mis par le signal du satellite pour atteindre plusieurs antennes de réception. Contrairement aux systèmes de navigation inertielle, la navigation par satellite fournit un positionnement absolu qui ne se dégrade pas dans le temps. Même le compas (magnétique ou gyroscopique) fournit une indication de cap, et la position est calculée approximativement. Le fonctionnement du GPS est décrit en détail ici. |

Publicités - Reklame