-
Avant de disposer d'un vrai gyrocompas (qui indique le nord), les français ont expérimenté avec un gyroscope (qui indique toujours la même direction). Ce gyroscope doit être calé à quai et puis lancé et indique la même direction. Le Gymnote (1888), premier sous-marin français en sera équipé (une boussole ne peut pas être utilisée dans un navire métallique). Les gyroscopes sont actuellement encore utilisés dans les avions (indication de l'horizom artificiel). Les avions militaires qui effectuent des virages serrés ne peuvent pas être équipés de gyrocompas, qui ne peuvent pas suivre le mouvement rapide de l'avion. On retrouve deux noms dans l'historique des gyrocompas:
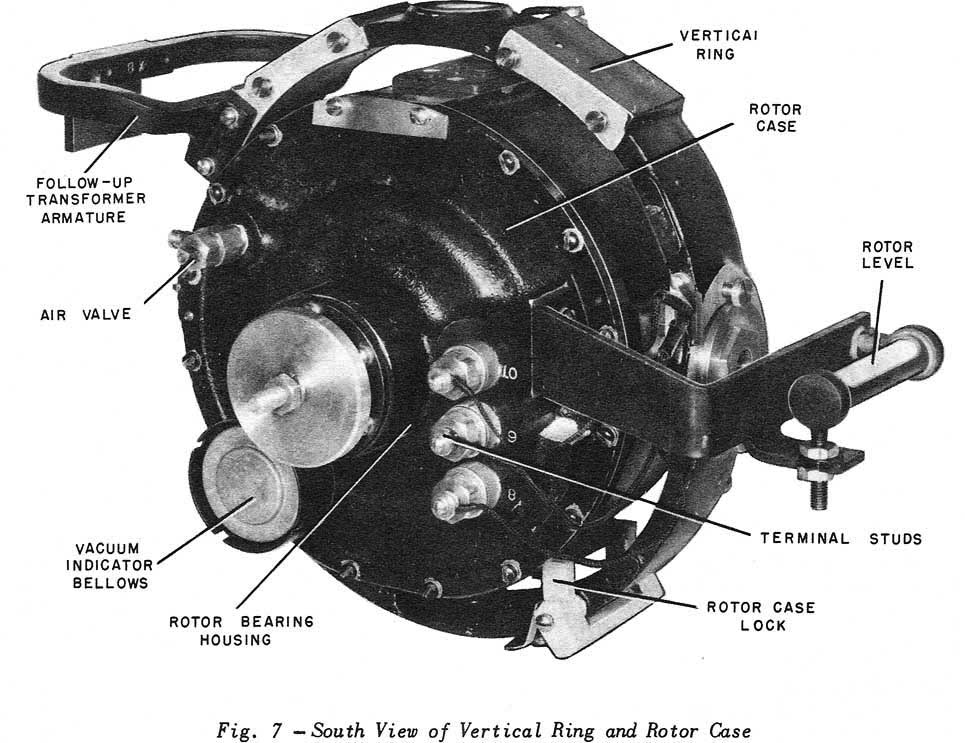
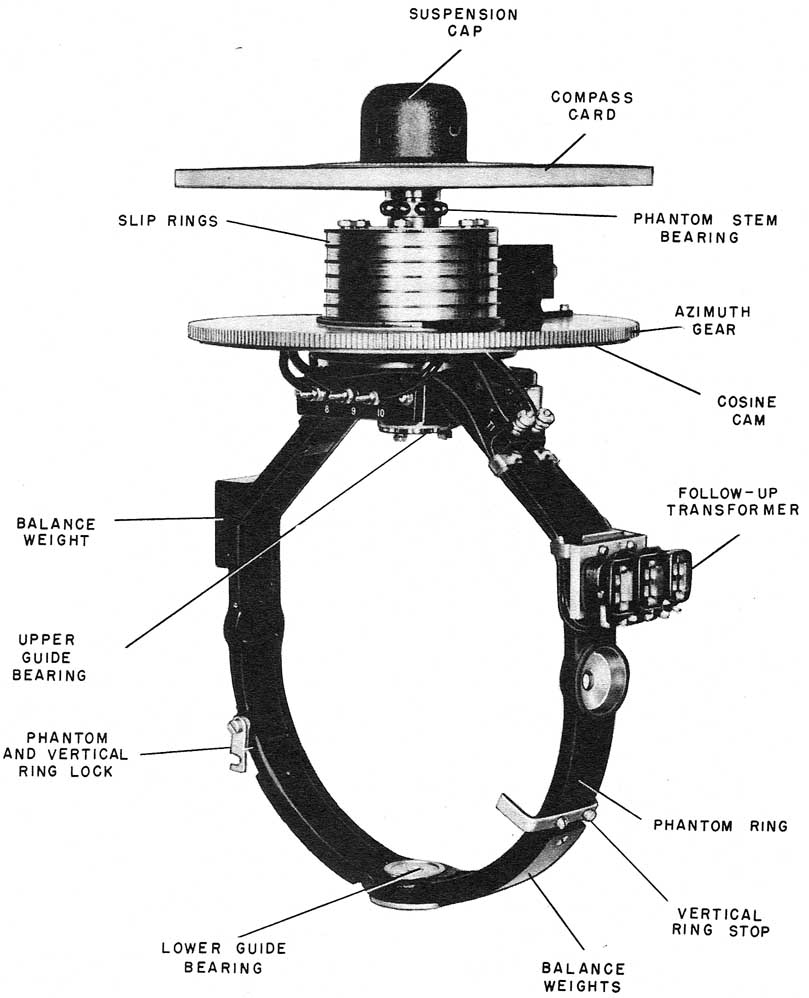
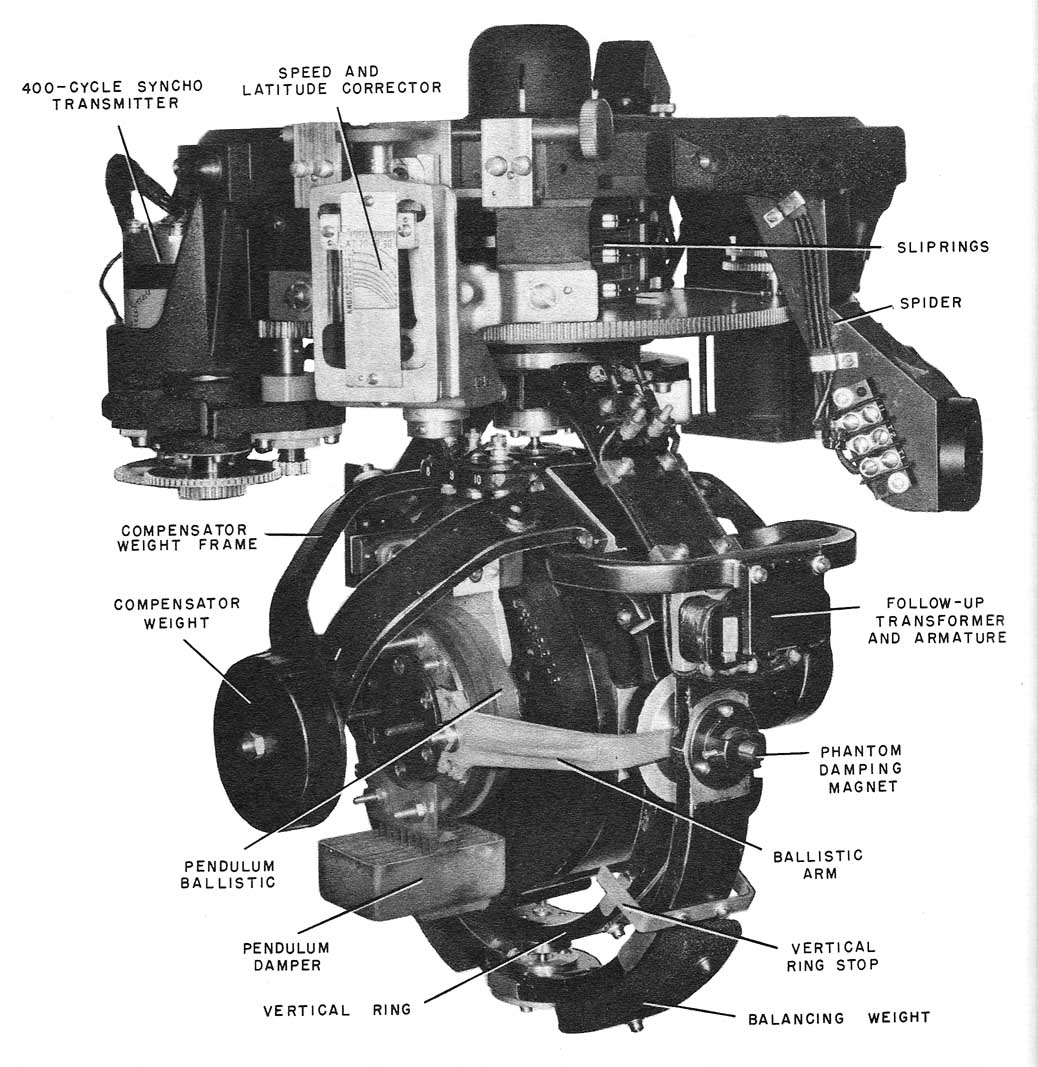
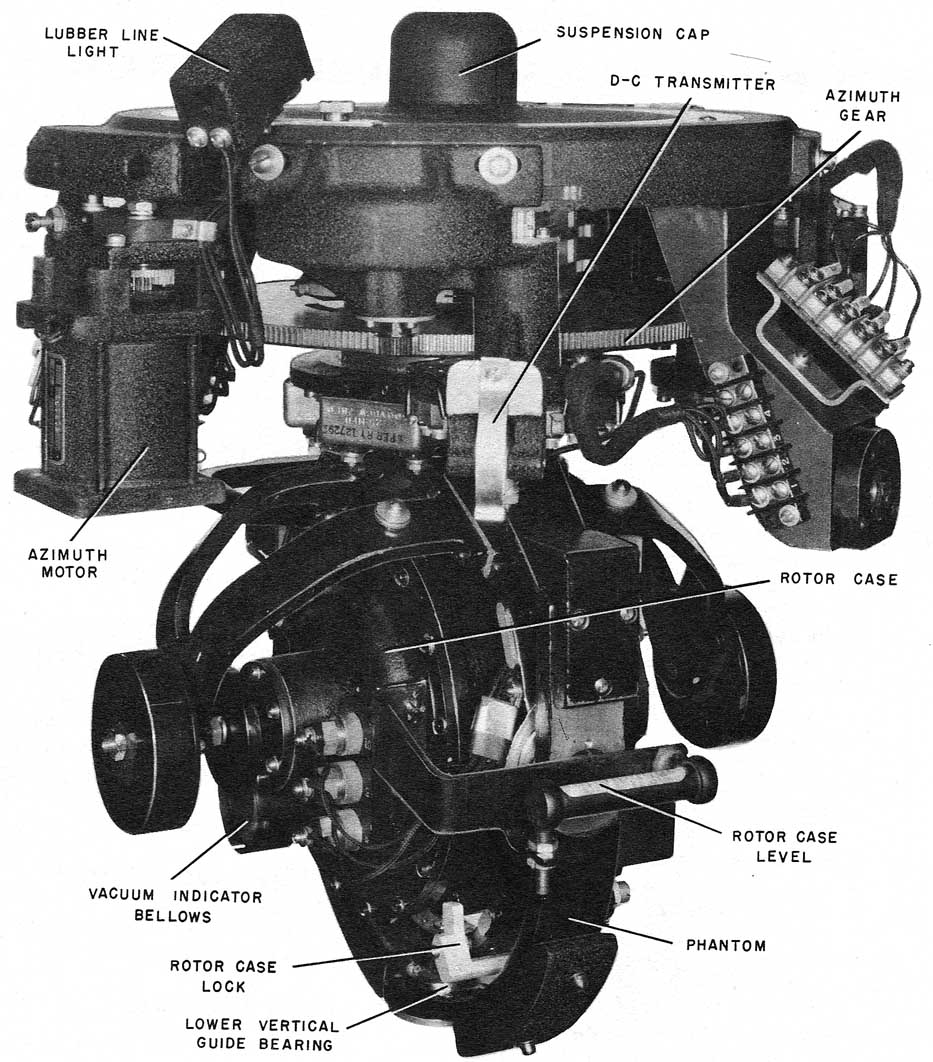
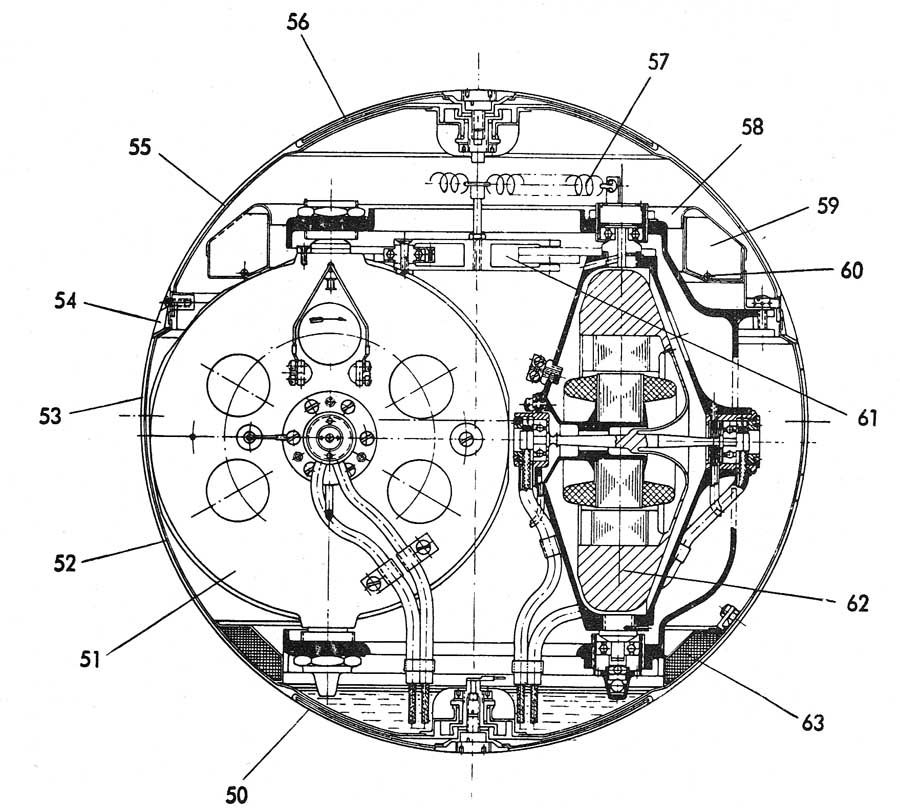
Et les anglais dans tous cà? C'est une nation maritime qui a besoin d'un gyrocompas au lieu d'une boussole dans les navires qui contiennent de plus en plus d'acier. Mais le lobby d'un fabricant de boussoles retarde l'entrée en service du gyrocompas. Le gyrocompas est alimenté par une source de courant stable. Il ne faut pas que l'alimentation soit interrompue, car un compas nécessite plusieurs heures pour se stabiliser après un arrêt. C'est pour éviter qu'un navire dont l'alimentation électrique est défaillante ne puisse plus déterminer son cap que tous les navires doivent obligatoirement être équipés d'une boussole magnétique (moins précise, mais qui ne dépend pas d'une alimentation électrique). La plupart des gyroscopes modernes sont alimentés par le réseau 24V du navire. La partie principale du gyrocompas est évidemment le gyroscope, c'est la partie qui tourne à très haute vitesse. Le moteur est un moteur asynchrone triphasé, mais dont la fréquence est par exemple de 400Hz au lieu de 50Hz (la seule manière d'obtenir une vitesse de rotation suffisamment importante). Cette partie sensible ne peut pas être freinée dans son mouvement, même pas par les cables d'alimentation du moteur du gyrocompas. La première image nous montre la partie principale du gyrocompas, notament le gyroscope ou gyrostat. On remarque en haut à droite l'armature du transfo de suivi. Le signal du transfo amplifié servira à commander le servo-moteur du suivi. On remarque également les 3 bornes du moteur triphasé. Le gyroscope est entouré d'un anneau appellée "phantom" (anneau fantôme) qui suit exactement le mouvement du gyrostat. Les cables d'alimentation du moteur ne sont donc jamais pliés et n'influencent donc pas le gyrostat. La seconde image nous montre l'anneau fantôme. Il a à son sommet la rose des vents (compass card). La ligne de foi (indication de l'axe longitudinal du navire) se trouve sur le boitier qui entoure la rose des vents. Il y a également 6 contacts électriques (anneaux = slip rings), trois pour l'alimentation du moteur du gyroscope et trois pour le transfo de suivi. Le moteur de suivi agit sur la roue dentée (azimuth gear). Cette roue dentée entraine également le ou les synchros pour transmettre la position aux compas répétiteurs. La position de l'armature du transfo (sur le gyrostat) par rapport au transfo (sur l'anneau fantôme) produit une saturation plus ou moins poussée d'un bras du transfo par rapport à l'autre, et donc une inductance plus ou moins élevée d'un bobinage par rapport à l'autre. C'est cette grandeur qui, amplifiée, va commander le moteur de suivi (servo-moteur). L'anneau va ainsi se positionner exactement parallèle au gyrostat. L'anneau fantôme doit non seulement effectuer une correction quand le gyrostat se tourne (rotation du gyrostat par rapport au navire fixe), mais également à chaque changement de cap du navire, puisque le gyrocompas est fixé au navire et entraine donc l'anneau (rotation du navire par rapport au gyrostat fixe). C'est évidemment le second mouvement qui a la plus grande amplitude. L'image 3 et 4 nous montrent le gyroscope complet (il ne manque que le servo-amplificateur). La partie supérieure est fixe, tandis que la partie inférieure peut tourner (gyrostat et anneau fantôme). Il y a à gauche (image 3) le synchro qui va transmettre la position de la rose des vents aux répétiteurs. Ce gyrocompas n'utilise pas de réservoirs reliés par des tubes, mais deux poids de chaque coté du gyrostat (voir fonctionnement d'un gyrocompas). Le terme ballistic indique la partie qui est influencée par la force gravitationelle et va produire la précession. On voit bien ici le transfo de suivi sur l'anneau fantôme (follow up transformer) et l'armature placée à l'extérieur. Sur l'image 4 (vue de l'autre coté) il y a à gauche le moteur de suivi (azimuth) et l'éclairage de la ligne de foi et de la rose des vents.
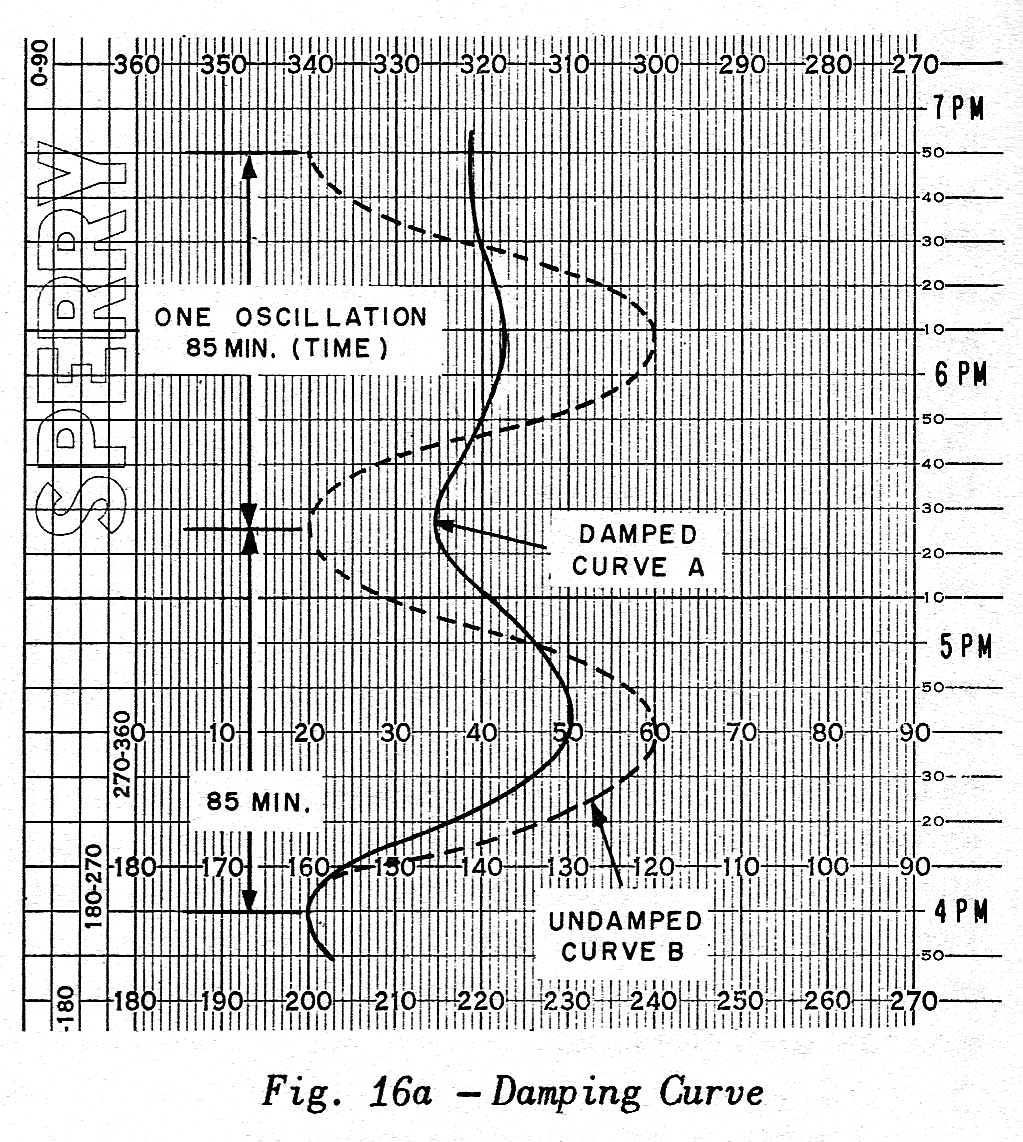
Le gyroscope avec sa masse élevée ne va jamais se stabiliser s'il n'y a pas un système d'amortissement. Dans un système à niveau de mercure, c'est le fin tuyau qui relie les réservoirs qui agit comme amortissement en limitant la vitesse de déplacement du mercure (on utilise maintenant de l'huile visqueuse). Dans les gyrocompas à pendule on utilise un second gyroscope dont la masse va servir à l'amortissement (gravure 5). Ce second gyroscope n'agit évidemment pas comme gyrocompas. Chaque fabricant utilise une combinaison d'éléments pour réaliser son gyroscope. Dans l'exemple (images 1 à 4) il s'agit d'un gyroscope à pendule dont l'amortissement est réalisé par un aimant (phantom damping magnet) et par des poids (pendulum damper). L'amortissement du gyrocompas est effectivement un problème, et les différents gyroscopes diffèrent par la façon dont l'amortissement est réalisé. Il faut réduire les oscillations parasites causées par le roulis, la tanguage et les virages du navire. Ces oscillations sont rapides par rapport à la masse du gyrocompas et ne produisent pas d'erreur de lecture. Par contre le gyrocompas met plusieurs heures pour se stabiliser après la mise en route. L'effet de la rotation de la terre est en effet infinitésimal par rapport aux autres forces auquelles le gyrocompas est soumis et ce n'est que parce que toutes ces forces sont intégrées sur un laps de temps suffisament élevé que les erreurs s'annulent à la longue. La gravure 6 nous montre la stabilisation d'un gyrocompas après sa mise en route. Grâce aux progrès de l'usinage, il est possible de fabriquer des gyrocompas plus petits qui se stabilisent plus rapidement. Le gyrocompas est rempacé dans certaines applications par des systèmes non-mécaniques (gyromètres laser, gyromètre à fibre optique) qui ne sont pas vraiment des gyrocompas, mais font partie d'une plateforme inertielle. Le gyromètre doit être calé par rapport à une référence, et puis va lentement dériver (0.1°/h pour un gyromètre commercial, 1m°/h pour un gyromètre utilisé dans les satellites). Le gyromètre est utilisé dans les navires militaires et les avions. |
Publicités - Reklame