| Les dynamos avec excitation indépendante (au lieu de série, shunt ou compound) fonctionnent en fait comme amplificateur magnétique mécanique. Un faible courant dans le bobinage d'excitation produit un courant plus important à la sortie de la dynamo. |
-
 Le groupe Ward Leonard utilise une dynamo avec excitation indépendante et son bobinage d'excitation a beaucoup de spires de fil fin pour avoir un champ magnétique puissant avec un faible courant. Sa self-induction est de ce fait très élevée. La modification de la tension d'excitation ne produit qu'une lente variation du courant de sortie. C'est utile (et même recherché) dans certaines applications, par exemple la commande d'ascenseurs car la commande se produit en douceur et sans à-coups.
Le groupe Ward Leonard utilise une dynamo avec excitation indépendante et son bobinage d'excitation a beaucoup de spires de fil fin pour avoir un champ magnétique puissant avec un faible courant. Sa self-induction est de ce fait très élevée. La modification de la tension d'excitation ne produit qu'une lente variation du courant de sortie. C'est utile (et même recherché) dans certaines applications, par exemple la commande d'ascenseurs car la commande se produit en douceur et sans à-coups.
Mais dans d'autres applications, il faut une réponse bien plus rapide (en particulier la commande de tir). L'amplidyne a été utilisé pour la première fois dans le guidage des canons. Le bobinage d'excitation principal n'a que quelques spires et le champ qu'il produit est relativement faible. Par contre sa self-induction est basse et il réagit très rapidement aux variations du courant en entrée. L'amplidyne (ou une de ses versions dérivées) peut remplacer la dynamo amplificatrice dans un montage Ward Leonard. La découpe à droite nous montre un amplidyne dont la construction diffère de celle d'une dynamo. L'excitation n'utilise que quelques spires de fil et le champ magnétique produit est faible. Mais sa self-induction est également faible et le courant de sortie suit rapidement le courant de commande. Le bobinage de neutralisation est réalisé avec quelques spires de fil épais (souvent méplat). Comme le courant dans ce bobinage série est très élevé, le champ produit l'est également. L'amplidyne remplace la dynamo comme élément amplificateur.
Schéma 1: une dynamo fournit une puissance de 10kW (tension de 100V sur une résistance de 1Ω) avec une puissance dans l'inducteur de 100W, donc une amplification de 100×. C'est le facteur d'amplification normal d'une dynamo.
FC champ de l'inducteur Une dynamo normale pour la production d'électricité ne sera jamais fabriquée d'une telle manière à cause de la réaction d'induit qu'il faut neutraliser (voir la compensation des dynamos, lien plus bas). Schéma 2: on cours-circuite les balais normaux et on réduit le courant dans l'inducteur de 100W à 1W. A cause du cours-circuit, le courant dans l'induit a fortement augmenté (il deviendrait prohibitif si on n'avait pas également réduit le courant dans l'inducteur). Le fort courant d'induit produit une très forte réaction d'induit en quadrature. Des balais placés en quadrature récoltent une tension de 100V. Schéma 3: Si on place une charge sur les balais en quadrature, on ne va récolter qu'un courant relativement faible. En effet ce courant produit à son tour une réaction d'induit parasitaire. FA réaction d'induit du courant en quadrature Schéma 4: on va éliminer la réaction d'induit avec un bobinage de compensation (dans le cas d'un amplidyne on utilise également le terme "bobinage de neutralisation"). C'est le même système que celui utilisé dans les dynamos industrielles. L'enroulement de compensation est parcouru par le même courant que l'induit et compense donc la réaction d'induit. Nous avons donc toujours la tension de 100V, mais on peut maintenant prélever un courant de 100A, ce qui nous donne une puissance de 10kW. FB champ de l'enroulement de compensation
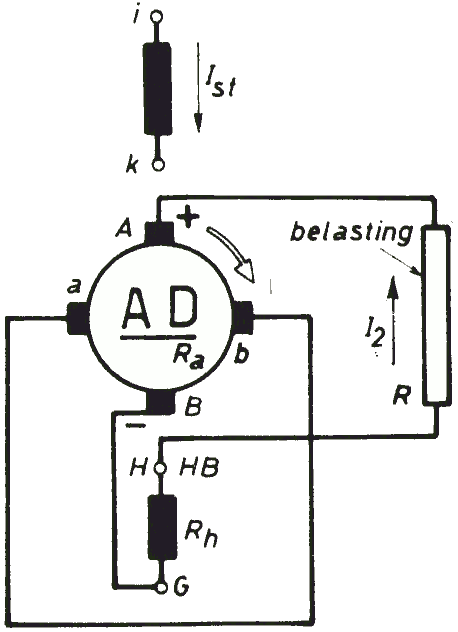
Cette puissance ne tombe pas du ciel: c'est le moteur qui entraine l'amplidyne qui fournit la puissance. La représentation d'un amplidyne est donné à droite.
Amplidyne et metadyneL'amplidyne est utilisé comme étage de puissance dans un servo (système de guidage). A cette époque, les tubes de radio n'étaient pas en mesure de fournir une puissance de plus de quelques watts. L'amplidyne pouvait amplifier la puissance d'un facteur de mille ou plus. Le signal amplifié permettait de commander un moteur: le signal était envoyé à l'induit d'un moteur à courant continu (le courant dans l'inducteur étant gardé constant).Si la puissance de l'amplidyne est encore trop faible, on y ajoute un second étage, un groupe Ward Leonard où le signal de sortie de l'amplidyne controle le champ d'une dynamo amplificatrice. La dynamo amplificatrice fournit alors le courant au moteur à courant continu. Un amplidyne sans enroulement de compensation du courant d'induit est un metadyne (compensation = 0). La courbe montre que la tension chute quand le courant augmente à cause de la réaction d'induit dans le cas d'un metadyne. Le métadyne garde le courant constant (proportionel à l'excitation), tandis que l'amplidyne qui est un amplificateur de tension la garde constante indépendamment de la charge. De nombreux amplificateurs sont construits avec une compensation de 0.6 permettant un bon transfert de puissance. Une telle construction (avec compensation réduite) était utilisée dans certains trains pour transformer la tension continue constante (de 600V) en tension variable pour commander les moteurs. On utilise des moteurs série qui ont un couple de démarrage très puissant mais ont un fort appel de courant. Ce système avait un meilleur rendement que le système à rhéostat, puisque le métadyne fonctionne comme un transfo et pas comme une résistance qui dissipe de la puissance. Le métadyne avec compensation de 0.6 garde la puissance constante (proportionelle à l'excitation) indépendamment de la charge. L'inconvénient principal est le poiuds du groupe. Il est même possible d'avoir un générateur avec une résistance négative (la tension augmente quand la charge augmente) en cas de surcompensation (C > 1). Il y avait peu d'applications pour un tel système.
Métadyne comme transformateurVoir fig. 371
Le metadyne se comporte en fait comme transformateur à courant continu! Cette construction n'utilise pas le bobinage de stator (qui peut même être éliminé). Il n'y a pas d'amplification de puissance et le moteur ne fournit aucune puissance. Le moteur sert simplement à transformer le champ magnétique fixe en champ magnétique variable (un vrai transformateur ne fonctionne qu'avec de l'alternatif). Il s'agit ici d'un vrai transformateur à courant continu qui transforme une tension variable en courant proportionnel. Cette construction est utilisée pour alimenter en courant un charge complexe (qui peut être en court-circuit).
Amplification de la puissanceLe gain en puissance de 10.000× d'un amplidyne (de l'inducteur à l'induit) est également possible avec un alternateur ou dynamo double (le premier alternateur fournit le courant d'excitation au second). Mais la construction double rend le système encore plus lent qu'une dynamo amplificatrice classique car le second inducteur à une inductance élevée. Le temps de réponse est trop lent pour une application industrielle et surtout militaire (radar de suivi). Le métadyne et l'amplidyne n'ont qu'un seul bobinage inducteur dont l'inductance peut être faible. Le fait qu'il n'existait pas de redresseurs suffisamment puissants à l'époque a fait que l'amplidyne est basé sur la dynamo.Les systèmes de servo-commande ont un amplidyne avec bobinage inducteur double avec prise médiane (split field) qui correspond au transfo de sortie d'un montage push pull avec des tubes radio. Le champ effectif est la différence du courant dans les deux enroulements. Quand le montage est en équilibre (courant identique dans les deux enroulements) le champ est nul et le courant fourni également nul. Ce montage permet à l'amplidyne de fournir un courant positif ou négatif. En cas de freinage, l'énergie récupérée est renvoyée au réseau (amplidyne mise en rotation par un moteur électrique connecté au réseau). Nous avons donc un amplidyne/metadyne qui amplifie le signal d'inducteur 10.000× fois. Ce signal amplifié alimente un moteur qui commande la charge. On peut ici utiliser un moteur classique, mais on utilise souvent la configuration Ward Leonard se composant
Si un gain de puissance relativement faible suffit, on utilise une dynamo amplificatrice au lieu d'un amplidyne, tandis que s'il faut une puissance très élevée on fait suivre l'amplidyne par une dynamo à excitation indépendante. Les dynamos amplificatrices spéciales (regulex, rototrol, etc) sont décrites sur la page des dynamos: elles ont un gain qui les situent entre les dynamos classiques et les amplidynes. Une configuration Ward Leonard permet un réglage de la puissance très souple. Les variations de charge sont parfaitement absorbées. Le courant des balais cours-circuités (quadrature) est parfois envoyé à un petit bobinage pour améliorer la commutation et réduire les étincelles aux balais. Le bobinage en quadrature ne doit pas être confondu avec le bobinage de neutralisation. 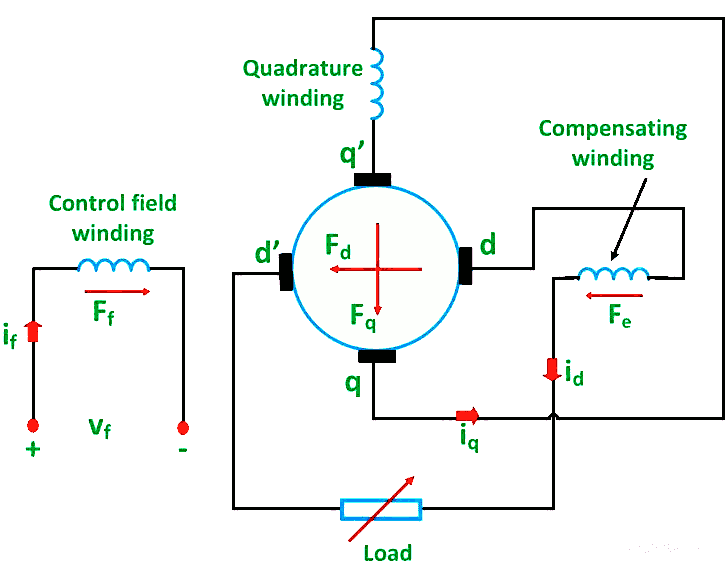
L'amplidyne a été inventé par Alexanderson et a été utilisé pour la première fois dans les radars de poursuite alliés pendant la seconde guerre mondiale (radars SCR-584). Le but de l'amplidyne était de produire les forts courants pour entrainer les moteurs de guidage du radar et des canons qui lui étaient accouplés. Les tubes électroniques de l'époque n'étaient pas en mesure de produire un courant suffisamment important, tandis que le fonctionnement des dynamos était bien connu.
L'amplidyne a eu beaucoup de succès. Le système était utilisé pour atteindre en vol les V1 allemands en direction de l'Angleterre. Plus tard, l'amplidyne a été utilisé pour commander souplement les élévateurs et dans les aciéries pour commander les gros moteurs du laminage. Il est possible d'accélérer ou de ralentir individuellement chaque cage du train de laminage (et de récupérer l'énergie du freinage). Les radars de poursuite utilisent le signal de différence du radar (produit par la commutation des lobes). Le synchro et le feed-back manuel sont éliminés: c'est le radar qui détermine lui-même si le contact est au milieu de la cible. Le radar est également connecté aux canons (avec une correction de distance pour compenser la dérive). Une réalisation pratique est visible ci-dessous. Une installation pratiquement identique oriente le radar, et du radar le signal de positionnement est envoyé au canons.
Et puis, nous sommes passés aux amplificateurs "statiques" c.à.d. ne comprenant pas de pièces mobiles (amplificateur à inductance saturable). Ces circuits n'utilisent pas encore des composants électroniques comme les tubes et les transistors, car ils ne sont pas en mesure de fournir la puissance nécessaire et n'ont pas la fiabilité nécessaire pour certaines applications militaires. |
 L'amplidyne (amplifying dynamo) est en fait une dynamo modifiée entrainée par un moteur (électrique, machine à vapeur ou diésel).
L'amplidyne (amplifying dynamo) est en fait une dynamo modifiée entrainée par un moteur (électrique, machine à vapeur ou diésel).

 Il s'agit d'un système de servo-régulation classique avec
Il s'agit d'un système de servo-régulation classique avec
Publicités - Reklame