-
Historique des systèmes de navigationPendant la seconde guerre mondiale plusieurs systèmes ont été développés pour déterminer la position d'un navire (et accessoirement également d'un avion), ce qui a abouti au Loran et Decca. Ces deux systèmes utilisent des stations émettrices à terre et la portée est limitée, dépendante des conditions météo. Ces systèmes ont continué à fonctionner jusqu'en 2000, où la plupart des émetteurs ont été mis à l'arrêt.
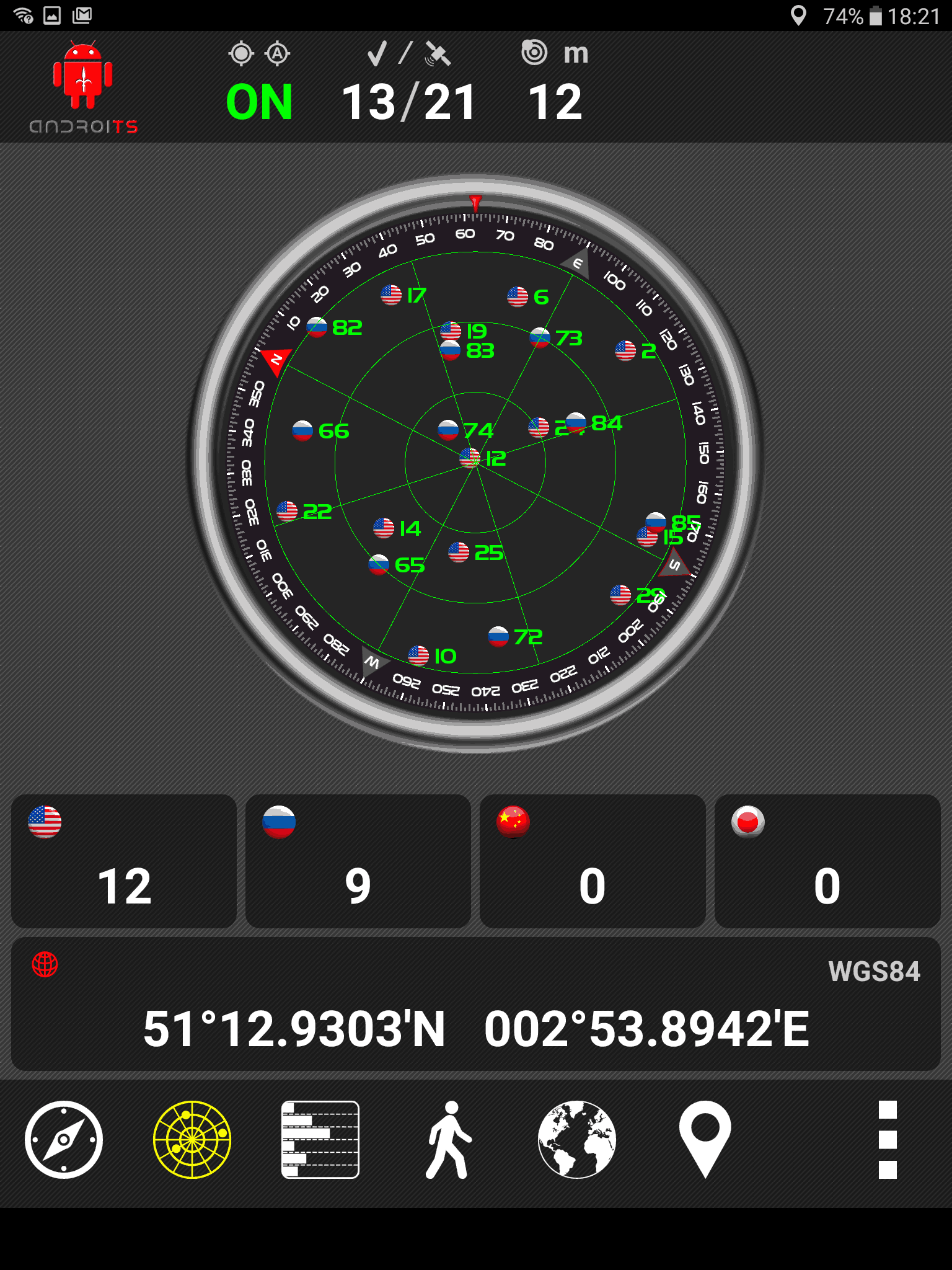
Le récepteur Magnavox MX-1102 donne la position du navire avec la latitude et longitude. Une indication de la viotesse et de la direction est également donnée. Ce système a été remplacé par le GPS, testé à partir de 1973 avec l'utilisation civile autorisée à partir des années 1980. Ce système avait une meilleure précision d'environ 5m. la précision dépend du nombre de satellites reçus et de l'immobilité du récepteur (un récepteur fixe permet un positionnement plus précis en faisant la moyenne de plusieurs mesures). L'Europe dispose également d'un système de navigation par satellite qui a la précision la plus élevée pour les applications civiles. Les récepteurs modernes (smartphones) permettent de recevoir le signal de toutes les constellations.
Comment fonctionne un système de navigation?
Detection d'un signal invisibleOn utilise des méthodes mathématiques pour calculer à l'avance le signal qu'on espère recevoir (le signal émis par le satellite se compose d'un code qui est continuellement répété). Le détecteur fonctionne un peu comme le décodage de la machine Enigma lors de la seconde guerre mondiale: on sait environ ce qu'on est en droit d'attendre (mouvement des navires et des troupes,...). A partir de cette information, on est en mesure de décoder le restant du message codé, puisqu'on en connait déjà une partie. La phase de synchronisation ou d'acquisition peut demander plusieurs minutes (le temps pour que le récepteur trouve le début de la séquence), mais une fois le synchronisme établi, le récepteur ne pert plus le nord (si on peut dire...). Pour faciliter la synchronisation, on recommande de rester sur place jusqu'à l'acquisition des coördonnées.
Le système GPS a également une erreur de positionnement d'environ 30 mètres (dans des conditions de réception idéales). En additionnant le signal (imprécis) de plusieurs satellites, on obtient une mesure bien plus précise. C'est une des lois de la statistique: plus le nombre d'échantillons est grand, et plus la moyenne est précise. En physique, on t'apprend à peser précisément un objet en utilisant une balance imprécise (si t'as été à l'école, bien sûr). Les systèmes de navigation modernes peuvent également décoder les signaux des satellites russes (et même européens, si jamais les européens arrivent à lancer tous leurs satellites et les faire fonctionner correctement).
Différences dans les récepteurs GPSMais ce qui fait maintenant la différence des nouveaux navigateurs, c'est la présence d'un détecteur TMC.
Récepteur GPS avec Traffic Message ChannelLe navigateur équipé d'un récepteur RDS a besoin d'un cable d'alimentation spécial qui sert d'antenne radio. Le code RDS est transmis en plus des programmes. Seuls les récepteurs adaptés peuvent décoder l'information RDS. Le débit autorisé est très limité, ce qui fait qu'on ne peut transmettre qu'un nombre limité de codes. On dispose de 2048 codes événementiels (route bloquée par un accident, ralentissement léger, déviation, etc). Tous les codes ne sont pas utilisés. On dispose également d'environ 60.000 endroits. Ce sont par exemple des tronçons d'autoroute ( + direction) entre deux sorties, d'une route nationale entre deux carrefours, etc. La précision de la position est limitée en comparaison des données GPS, mais grâce à la carte, il est possible de voir si la route à suivre est dégagée ou non, et de calculer une route alternative.
Il est également possible de travailler avec des tableaux alternatifs, qui doivent être achetés séparément. Le code TMC correspondant est émis par un émetteur commercial qui a un accord avec le fournisseur de la carte. Le décodeur GPS+RDS est en mesure de décoder le signal de tous les émetteurs, mais il ne peut utiliser l'information ainsi récoltée que s'il dispose de la carte correcte: le récepteur recherche automatiquement un émetteur qui a le code qui correspond au tableau activé. Ces cartes sont limitées à une région très peuplée (par exemple la capitale), là où l'information nationale est trop grossière.
Navigateur sur smartphoneLe navigateur classique basé sur les données RDS peut généralement fournir une situation plus précise (mais moins détaillée) car les mesures de la circulation sont basées sur des boucles dans la route où on mesure à la fois la vitesse et la densité de la circulation. Ces données sont centralisées et transmises aux émetteurs nationaux. L'information qui est envoyée aux navigateurs via le signal RDS peut fournir le retard effectif, ce qui permet au navigateur de calculer plus facilement un itinéraire de déviation. Le navigateur classique est limité par le signal RDS et ses caractéristiques. Le système utilise des zones relativement grandes, car quand le système a été développé il n'y avait pas tant de routes (et de bouchons). Le système permet de signaler des accidents ou des autres conditions anormales (animaux sur la route,...), mais il y a un petit délai, les données étant cumulées et transmises au bout de quelques minutes. Le bouchon a parfois disparu quand on arrive dans la zone, ou on tombe sur un bouchon qui vient juste de se former. Les systèmes de navigation qui tournent sur un smartphone se basent eux exclusivement sur les données des autres utilisateurs. Google maps continue à tourner en arrière plan sur le téléphone, même quand l'application est fermée. Elle reçoit le signal GPS, calcule sa position et envoie régulièrement un signal de télémétrie aux serveurs google. Google peut ainsi calculer la vitesse moyenne des véhicules sur chaque route. Google peut travailler avec des zones plus petites, cela dépend du nombre d'utilisateurs sur la route en question. Les petites routes avec trop peu de véhicules pour calculer une vitesse moyenne ne sont pas prises en compte, mais cela signifie également qu'il n'y a pratiquement pas de circulation sur la route en question. Mais s'il y a un accident et un bouchon qui se forme, l'information est relayée aux utilisateurs. Plus il y a d'utilisateurs sur une route, et plus la mesure est précise. Le système peut indiquer là où il y a des ralentissements, mais ne peut pas encore calculer combien de temps est perdu à un endroit particulier. Le navigateur indique les endroits où la circulation est ralentie, mais ne peut pas signaler s'il s'agit d'un bouchon ou d'une situation structurelle normale (zone 30, feux de circulation,...) La navigation avec un smartphone devient de plus en plus performante. Il y a 10 ans, elle était considérée comme un gadget, il s'agissait d'un simple navigateur basé sur les cartes google, sans informations en temps réel. Puis le nombre d'utilisateurs s'est accru, ce qui a permi d'ajouter des fonctionalités. Actuellement on ne vend pratiquement plus de navigateurs classiques. Notez que les smartphones ne peuvent pas combiner l'information de google avec les données RDS. L'information RDS/TMC est transmise par les émetteurs de radio qui travaillent à une fréquence plus basse qui nécessite une antenne d'une certaine longueur. |

 Pour permettre de couvrir toute la terre, les satellites ne sont pas en orbite géostationnaire, mais circulent à une hauteur plus basse. Ils ne sont donc pas fixes mais se déplacent continuellement par rapport à la terre.
Pour permettre de couvrir toute la terre, les satellites ne sont pas en orbite géostationnaire, mais circulent à une hauteur plus basse. Ils ne sont donc pas fixes mais se déplacent continuellement par rapport à la terre.
 Les évènements sont standardisés à l'échelle internationale, mais les endroits sont définis par pays (ou par région couverte par un émetteur). A chaque code d'émetteur correspond un tableau qui transforme le numéro de position (fourni par le code TMC/RDS) en endroit sur la carte. La chaine publique nationale émet le code RDS sur un de ses programmes nationaux. On peut donc définir environ 60.000 endroits par pays.
Les évènements sont standardisés à l'échelle internationale, mais les endroits sont définis par pays (ou par région couverte par un émetteur). A chaque code d'émetteur correspond un tableau qui transforme le numéro de position (fourni par le code TMC/RDS) en endroit sur la carte. La chaine publique nationale émet le code RDS sur un de ses programmes nationaux. On peut donc définir environ 60.000 endroits par pays.
Publicités - Reklame