| Le moteur universel est le moteur le plus souvent utilisé pour les petites puissances. |
-
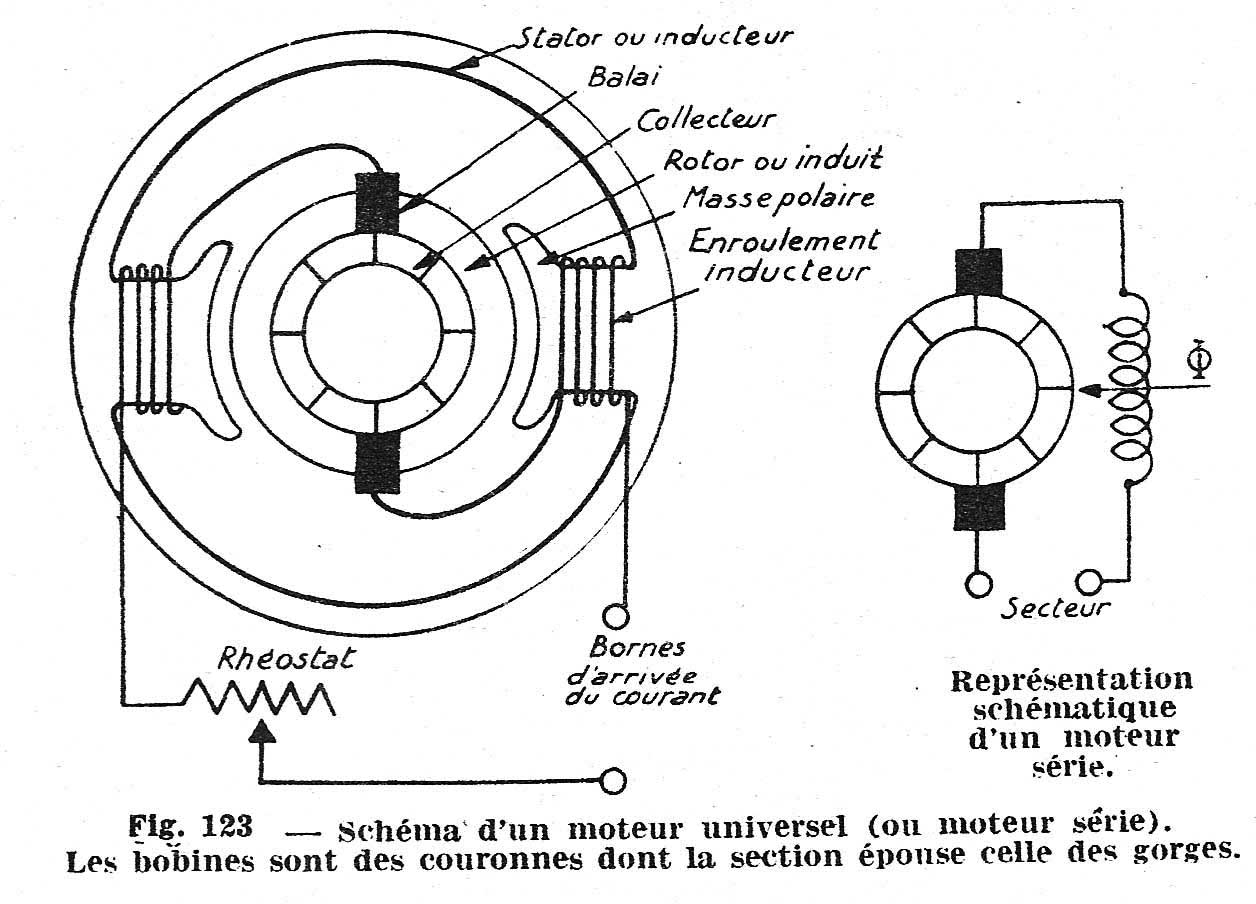
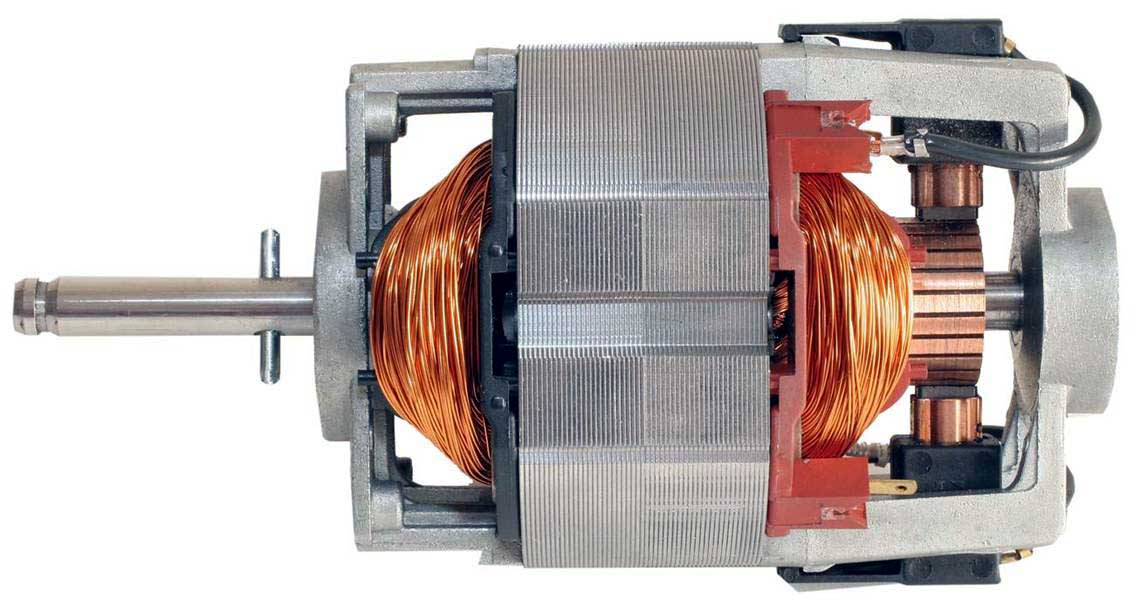
Moteur universel en courant alternatifLe moteur universel se compose d'un rotor et d'un stator bobiné en série. Pour un fonctionnement universel les tôles sont faites de lamelles isolées les unes des autres pour limiter les pertes au fer (courants de Foucault). Ces moteurs peuvent tourner très vite, jusqu'à 25.000 tours/minute.Le moteur tourne toujours dans le même sens, car quel que soit la polarité, le champ magnétique du rotor et du stator sont toujours dans le même sens (les deux changent en même temps). On peut donc alimenter le moteur en continu au lieu de l'alternatif (ces moteurs sont normalement conçus pour de l'alternatif). Le moteur universel (pour le courant alternatif) est toujours bobiné en série (inducteur en série avec l'induit). Un moteur shunt a un couple plus constant mais n'est pas utilisé en pratique à cause des étincelles très présentes. Comme l'inductance du stator est plus élevée que celle du rotor, il se produit un déphasage du courant entre rotor et stator. Le déphasage produit des étincelles et diminue le rendement du moteur. Le déphasage dépend de la charge du moteur et ne peut pas être compensé par des pôles de compensation. Dans un moteur série, le courant est le même dans le stator et le rotor et le problème ne se pose pas.
Avantages du moteur universelLe moetur universel fonctionne aussi bien avec du continu qu'avec de l'alternatif (il fonctionne mieux sur du continu). Il n'a pas besoin de courant triphasé ou d'un montage déphaseur. Le moteur a un meilleur facteur de puissance qu'un moteur asynchrone.Le moteur a une puissance plus élevée par unité de poids ou de volume: le moteur peut donc être plus petit pour une puissance donnée. Le couple est maximal à basse vitesse (ce qui est souvent recherché) et le moteur tourne à vitesse très élevée. Le couple décroit assez linéairement avec la vitesse de rotation, ce qui est très interessant pour de nombreuses applications.
Force contre-électromotriceA l'arrêt, le courant est limité uniquement par la résistance des bobinages. Le couple au démarrage est de ce fait très élevé. L'appel de courant peut donc être très important s'il n'est pas limité dans les gros moteurs. Quand le moteur prend de la vitesse, une force contre-électromotrice apparait dans le rotor (induit), cette tension correspond à la tension que le moteur aurait produit en fonctionnement dynamo. Cette tension est dans le sens contraire à la tension d'alimentation et réduit ainsi le courant, et donc également le couple du moteur.Comme le courant diminue quand la vitesse augmente, le champ magnétique diminue également. La force contre-électromotrice diminue et le courant augmente à nouveau. L'augmentation du courant produit une augmentation de la vitesse de rotation, jusqu'à ce qu'il y ait un équilibrage. La vitesse de rotation dépend donc très fortement de la charge du moteur. Le moteur peut s'emballer s'il tourne à vide. Ces moteurs sont caractérisés par un couple de démarrage énergique mais le moteur à tendance à s'emballer à vide. C'est pour cela qu'on monte toujours un petit ventilateur sur l'axe. Ce ventilateur à pales radiales (c'est mal foutu et c'est fait express) oppose un couple qui augmente fortement avec la vitesse de rotation.
UtilisationOn l'utilise dans les appareils ménagers, du moulin à café à la foreuse, mais également dans les machines à laver où il peut tourner lentement dans les deux sens (lavage) mais également à haute vitesse (essorage).Si on est passé assez rapidement aux moteurs asynchrones pour les applications génériques de puissance supérieure à 1kW (avec éventuellement des systèmes de limitation de l'appel de courant), pour les applications pointues on en est resté aux moteurs universels jusqu'à l'apparition de circuits hacheurs à thyristors (dans les années 1980) qui permettent de varier la vitesse des moteurs asynchrones par changement de la fréquence. Une utilisation était par exemple la commande d'ascenseurs, la commande précise de machines, le suivi du radar (radar de poursuite), etc. Le moteur était alors souvent associé à une commande Ward Leonard à courant continu. Ces moteurs ont également été utilisés dans les trains à cause de leur fort couple au démarrage.
Points faiblesLe point faible principal de ce type de moteur est les charbons. Tout le courant doit passer par les charbons, qui appuient fortement sur le collecteur et doivent être remplacés toutes les 500 heures environ (pour vous donner un ordre de grandeur). On peut réduire les parasites de commutation grâce à l'utilisation de petits condensateurs et de selfs sur les cables des charbons.L'appel de courant est très important lors de la mise en route, souvent plus important que l'appel de courant d'un moteur asynchrone de même puissance. Un système de limitation n'est normalement pas prévu parce que les moteurs ne sont utilisés que pour de basses puissances. Le moteur grille très rapidement s'il est bloqué. Le moteur produit également un couple variable qui dépend de la position actuelle du rotor et de la fréquence du réseau (ces moteurs sont toujours monophasés et ce réseau produit une pulsation de 100Hz). Ce moteur produit donc plus de vibrations et de bruit qu'un moteur asynchrone. Ce qu'on sait moins c'est que ces moteurs ont également un moins bon rendement que les moteurs asynchrones (cage d'écureuil) et synchrones.
Compensation de la réaction d'induitLa raison de ce mauvais rendement est le fait que la réaction d'induit fait se déplacer la ligne neutre selon le courant dans l'induit. Pour réduire les étincelles aux balais et augmenter le rendement, certains moteurs ont des pôles de compensation
Le rendement d'un moteur compensé peut être très bon, mais celui d'un moteur non-compensé est d'environ 30%. Cela veut dire que pour un moteur d'aspirateur de 1000W, environ 700W sont dissipés en chaleur. Il est donc absolument nécessaire que la circulation d'air ne soit pas interrompue! Une variante du moteur universel est le moteur à répulsion (ou répulsion-induction dans certaines versions). On peut modifier le sens de rotation du moteur par déplacement des balais. Ce moteur a des caractéristiques qui le placent entre le moteur universel et le moteur à induction (moteur asynchrone). |
Publicités - Reklame