| Les générateurs les plus courants fonctionnent en mode synchrone, c.à.d. synchronisées au réseau. Il existe également des moteurs dont la vitesse de rotation est synchronisée au réseau électrique. |
-
Moteurs synchrones
Le moteur synchrone basse puissanceLe champ tournant est généralement réalisé par l'utilisation du courant triphasé, mais la plupart des moteurs synchrones ont une puissance relativement faible, ce qui fait que le triphasé est un "overkill". On produit un champ tournant
La gravure 1 montre une réalisation pratique d'un moteur à bague de démarrage. La bague de démarrage ou bague déphaseuse est une spire en cuivre. Le champ magnétique dans le pôle produit un courant. Quand le champ magnétique diminue, le courant dans la spire fait que le champ ne disparait pas immédiatement mais avec un petit retard.
Moteur synchrone à hystérésisLe moteur synchrone à hystérésis a un rotor qui n'est pas aimanté. Le rotor se compose d'un cylindre d'un métal qui peut facilement être magnétisé (acier dopé au cobalt). Quand le moteur est alimenté, il produit un champ magnétique dans le rotor, qui le magnétise. Quand le champ magnétique est tournant, le rotor tente de suivre le champ magnétique et se met également à tourner. Dans le rotor, seul les aciers à fort hystérésis peuvent être utilisés (donc pas du fer doux). C'est l'hystérésis qui fait apparaitre le champ magnétique fixe (c'est le magnétisme rémanent) et qui détermine le couple maximal que le moteur peut atteindre.Ce moteur est utilisé pour des applications où un faible couple est suffisant (horloges, horodateurs, petits mécanismes,...). Comme le moteur a un faible rendement, il n'est utilisé que dans lers petits moteurs. La puissance fournie est environ 1/4 de la puissance d'un moteur asynchrone de même taille. Le moteur décroche facilement et ne peut entrainer que de faibles charges. Le couple est relativement constant pendant le démarrage et la montée en vitesse, jusqu'au moment où la vitesse de synchronisme est atteinte. Pour ces petites puissances, on utilise du courant monophasé et on produit le champ tournant par des bagues de Frager.
Moteurs synchrones de grande puissanceCes moteurs synchrones dont le couple au démarrage est très faible utilisent une cage d'écureuil résistive pour démarrer (voir moteur asynchrone). Une fois lancés, c'est le couple synchrone qui prend le dessus et la cage d'écureuil qui ne voit plus de champ magnétique variable n'a plus aucune fonction. Le stator d'un moteur industriel est identique, que ce soit pour un moteur asynchrone ou synchrone. Par contre il n'existe pas de moteur dahlander synchrone. Pour créer le champ magnétique, on utilise des aimants, ce qui rend le moteur relativement cher. De plus le montage et le démontage nécessite des précautions particulières. Utilisé en surcharge ou à une température trop élevée, les aimants peuvent perdre leur magnétisation, rendant le rotor inutilisable. Il existe également des moteurs synchrones à électro-aimant, le courant est apporté par deux bagues et des frotteurs. Le courant pour l'électro-aimant doit être redressé. Ce moteur a un moins bon rendement et nécessite plus d'entretien. Le moteur synchrone peut être utilisé en générateur électrique (c'est même le type de générateur le plus souvent utilisé). Le champ magnétisant est produit par un bobinage alimenté par des bagues et balais ou par un second générateur inversé sur le même axe. Cette construction permet de se passer de balais et de bagues.
Démarrage de moteurs synchrones
Au début, comme le pole sud se trouve à Z1, le rotor aura tendance à tourner vers la gauche, puisque les poles contraires s'attirent. Mais très rapidement le pole sud se trouve à Z2, forçant le moteur à tourner vers la droite. Les deux forces qui sont identiques s'annullent et le moteur n'arrive pas à démarrer. Ce n'est que si le moteur tourne à une vitesse proche de sa vitesse synchrone qu'il va s'accrocher au champs tournant. Le moteur synchrone dispose toujours d'une cage d'écureuil résistive pour permettre le démarrage comme un moteur asynchrone. Mais notre moteur fonctionnerait très mal avec ses trois bobinages qui vont provoquer des à-coups. Dès que la vitesse varie un peu de la vitesse de synchronisme, un tel moteur déchroche. Pour éviter ces inconvénients, les moteurs synchrones ont tout comme les générateurs (mais pour des raisons différentes) des enroulements répartis qui font évoluer le champs magnétique de Z1 à Z2 de façon souple. Cela ne permet toujours pas le démarrage, mais une fois qu'il tourne, il tourne souplement sans grondement. Les enroulements répartis sont également utilisés avec les moteurs asynchrones. Et vous, vous avez compris maintenant? (le rotor a également trois poles, mais c'est trop difficile à dessiner)
Les petits moteurs pas-à-pas utilisés dans certaines applications (imprimantes à jet d'encre,...) sont des moteurs à réluctance variable. Ils permettent un positionnement très précis, à un "pas" près. On a redécouvert les moteurs à réluctance variable et on les utilise dans certaines applications grâce à leur très bon rendement et leur construction simple (voitures électriques, gros moteurs de ventilateurs, de pompes et de compresseurs,...) Le moteur à excitation externe et transformateur rotatif est une version du moteur synchrone qui utilise un transformateur rotatif pour transmettre la puissance au bobinage du rotor. Il permet d'éviter les bagues et les frotteurs et nécessite moins d'entretien. Tous les moteurs synchrones sont utilisés pour la propulsion de voitures électriques à cause de leur haut rendement. |
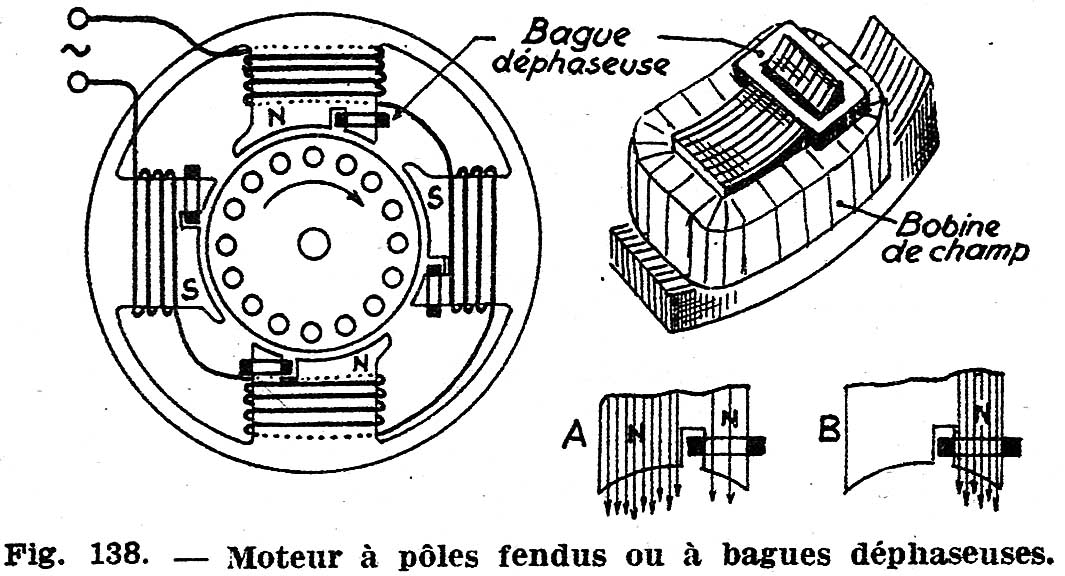
 Moteur synchrone qui utilise une bague déphaseuse pour produire le champ tournant.
Moteur synchrone qui utilise une bague déphaseuse pour produire le champ tournant.
 Prenons un moteur qui se trouve dans la situation à droite. Nous avons un champs magnétique statorique tournant dans les sens des aiguilles d'une montre. Le rotor est fixe. Nous alimentons le moteur. Le pole sud passe successivement aux bobinages Z1, Z2 et puis Z3 pour recommencer.
Prenons un moteur qui se trouve dans la situation à droite. Nous avons un champs magnétique statorique tournant dans les sens des aiguilles d'une montre. Le rotor est fixe. Nous alimentons le moteur. Le pole sud passe successivement aux bobinages Z1, Z2 et puis Z3 pour recommencer.
| Moteur asynchrone classique | Moteur synchrone (électro-)aimant | Moteur à réluctance variable |
|---|---|---|
| Construction simple, utilisée dans pratiquement toute l'industrie. En modifiant la forme des barres de la cage d'écureuil, on peut fabriquer des moteurs avec une courbe de couple différente. | Nécessite des aimants permanents ou des électro-aimants (rotor bobiné). Les aimants ou les électro-aimants introduisent des contraintes que le moteur asynchrone n'a pas. | Type de moteur peu connu dans l'industrie. Le moteur est très simple et facile à fabriquer. A puissance égale le moteur peut être plus petit, car le rotor dissipe moins de chaleur. |
Bon rendement, est utilisé dans toutes les applications courantes | Très bon rendement, est utilisé là où le rendement est primordial (très gros moteurs et voitures électriques) | Très bon rendement, est utilisé dans les voitures électriques |
Avec ou sans variateur de fréquence, moteurs double ou triple vitesse possible sans variateur | Est toujours utilisé avec variateur de fréquence sauf si présence d'une cage d'écureuil (démarrage dfifficile) | Nécessite un variateur de fréquence adapté |
Très souple, peut être utilisé partout | Très cher (aimants), limité aux applications spécifiques | Cher parce que peu utilisé, idéal pour les régimes variables |
Publicités - Reklame