| Le moteur à répulsion est un moteur monophasé qui ressemble au moteur universel, sauf que le circuit du rotor n'est pas branché en série avec le stator, mais cours-circuité. |
-
Moteur à répulsionLe moteur à répulsion a le collecteur en cours-circuit. Le moteur est alimenté en alternatif et selon la position du collecteur par rapport à la ligne neutre, le moteur tourne dans l'un ou l'autre sens.Malgré son isolement apparent, le rotor ou induit est parcouru par un courant, car il constitue le secondaire d'un transfo dont le primaire est le stator. Le courant se referme par le collecteur et les balais. Le courant fait apparaitre un champ magnétique qui reste stationnaire dans l'espace pendant la rotation, car sa position est liée à celle des balais. Ces poles maintiennent une action répulsive permanente à l'égard des poles du stator.
Tandis que le moteur universel est limité en tension (à cause des étincelles aux balais), cela n'est pas le cas avec le moteur à répulsion, dont le circuits econdaire est indépendant du circuit primaire. Si on utilise un bobinage avec peu de spires de fort diamètre, on peut limiter la tension aux lamelles du collecteur à une valeur suffisamment faible pour éviter la formation d'un arc électrique au collecteur. Ce type de moteur était parfois utilisé dans certaines applications spécifiques: moteurs de chemin de fer (car le moteur se contente d'une alimentation monophasée), moteurs d'ascenseurs, de compresseurs,.. Ils étaient utilisés là où un couple de démarrage élevé était nécessaire. Ce type de moteur ayant un moins bon rendement qu'un moteur universel, il était donc moins souvent utilisé. Le couple au démarrage est également un peu plus faible (mais toujours très important). Le positionnement des charbons va déterminer le sens du champ dans le rotor, et donc le sens de rotation du moteur. Normalement les charbons sont placés à 45° de la ligne neutre. Le champ du stator repousse le champ rotorique de même sens (de là le nom de moteur à répulsion). Le moteur peut être fabriqué pour travailler à une basse vitesse (ventilateurs de plafond) en augmentant le nombre de poles au stator.
Moteur à répulsion-inductionDans les rares applications où ce moteur était utilisé, on combine le puissant couple de démarrage allié à un faible appel de courant qui caractérise le moteur à répulsion avec la vitesse quasi-constante à toutes charges et l'absence de parasites qui sont l'apanage du moteur à induction (repulsion start induction run en anglais).Le moteur démarrait comme moteur à répulsion (avec un couple élevé) et à partir d'une vitesse donnée (environ 75%), quand le couple devenait plus faible, les balais étaient automatiquement relevés et le collecteur était cours-cirtcuité par une plaquette. En régime normal, le moteur travaillait comme un moteur à induction (rotor à cage bobinée en cours circuit).
Le graphique indique le couple d'un moteur à répulsion et d'un moteur à induction selon la vitesse de rotation. Le changement de mode de fonctionnement est indiqué par le changement de couleur. Le changement de mode s'effectue ici à 80% de la vitesse nominale à vide (V nom), quand le couple du fonctionnement en moteur à induction dépasse celui du moteur à répulsion. La vitesse de synchronisme (V syn) est la vitesse d'un moteur synchrone équivalent. Quel était l'avantage d'une telle construction?
Cela semblerait donc être un moteur avec de très grands avantages, mais il n'est plus utilisé actuellement car il a également des inconvénients:
Le moteur à répulsion-induction a surtout été utilisé aux Etats Unis (où on retrouve moins de réseaux domestiques en triphasé), tandis qu'en Europe on donnait la préférence aux moteurs à cage bobinée. Contrairement à la plupart des moteurs à cage bobinée qui ont une commutation manuelle, la commutation s'effectue automatiquement par des masselotes mues par la force centrifuge. Dès que la vitesse de commutation est atteinte, le collecteur est mis en cours circuit et puis les balais sont relevés pour limiter leur usure. Il n'est plus utilisé actuellement, sauf certaines applications historiques. Le moteur à répulsion simple a toujours été moins utilisé que le moteur universel qui a un rendement plus élevé.
La tension d'alimentation est de 115 ou 230V selon que les deux bobinages du stator sont branchés en série ou en parallèle. Le courant est alors de 40 ou 20A, ce qui correspond à 4.6kVA. La puissance mécanique est de 3CV, donc 2237W. Le rendement total du moteur est donc de 49%, nettement moins qu'un moteur asynchrone (moteur à induction). La vitesse de rotation du moteur est de 1750 tours: il s'agit donc d'un moteur à 4 pôles (et donc 4 balais). Le rendement du moteur diminue légèrement avec l'augmentation des pôles. Le moteur est alimenté en 60Hz. Quand on ne dispose pas de triphasé (comme aux Etats Unis il y a 50 ans), le seul type de moteur qu'on pouvait utiliser, c'était ce type de moteur. On change le sens de rotation du moteur en libérant le porte-balais (brusholder) et en le déplacant vers le second index. |
 Les caractéristiques du moteurs sont assez semblables à celles d'un moteur série (
Les caractéristiques du moteurs sont assez semblables à celles d'un moteur série (
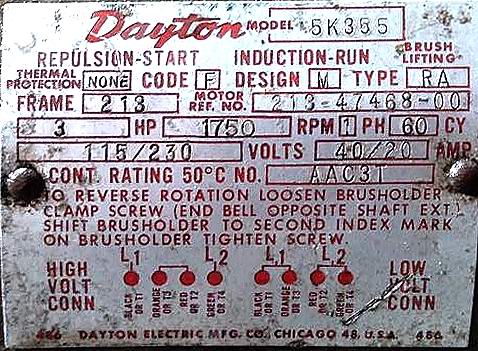 Plaque signalétique d'un moteur à répulsion-induction américain (repulsion-start induction-run).
Plaque signalétique d'un moteur à répulsion-induction américain (repulsion-start induction-run).
Publicités - Reklame