| Le moteur à réluctance variable est un moteur de type synchrone (il tourne à la même vitesse que la fréquence du réseau). Il est une évolution du moteur pas-à-pas. |
-
 Le moteur pas à pas est la version de base du moteur à réluctance variable. Le moteur à réluctance variable connait un intérêt croissant à cause de son rendement élevé. Il a vraiment pris son essor avec l'apparition de commandes électroniques adaptées (VFD: variable frequency drive).
Le moteur pas à pas est la version de base du moteur à réluctance variable. Le moteur à réluctance variable connait un intérêt croissant à cause de son rendement élevé. Il a vraiment pris son essor avec l'apparition de commandes électroniques adaptées (VFD: variable frequency drive).
Contrairement au moteur pas à pas qui a des poles saillants pour modifier la réluctance du rotor, le moteur à réluctance a des fentes qui forment des barrières de flux. Les deux axes d et d' permettent le flux magnétique le plus élevé, tandis que les axes q et q' ont la réluctance la plus élevée. Mais le moteur est un compromis: il faut un entrefer important pour avoir une barrière efficace, ce qui laisse peu de place pour le métal. Il y a donc saturation aux endroits rouges. La saturation empèche le champ magnétique d'augmenter et forme une limitation au couple que le moteur peut atteindre. D'un autre coté, il faut prévoir des ponts pour assurer la stabilité de l'ensemble, ces ponts permettent aux flux de passer dans l'axe q et q'. La construction de l'ensemble est assez fragile comparée à un moteur à induction et la vitesse du moteur est limitée, surtout pour les moteurs ayant un grand diamètre. On remplit actuellement les fentes d'un matériau amagnétique et isolant (plastique, fibre de carbone, résine époxy,...) pour assurer la solidité de l'ensemble.
Moteurs à réluctance variable de grande puissanceIls nécessitent un variateur de fréquence adapté qui permet de commander chaque phase individuellement (plan ci-dessous). Les doubles transistors permettent
 Voici la courbe des courants dans les trois phases. Elle dépend des caractéristiques du moteur utilisé. Le moteur à réluctance variable à commutation électronique (MRVCE) est donc resté très longtemps dans les oubliettes de l'histoire de l'électricité, jusqu'à l'apparition de variateurs de fréquence conçus pour ce type de moteur. Le variateur de fréquence permet un fonctionnement souple à toutes les vitesses et le rendement est meilleur qu'avec un moteur asynchrone.
A gauche un moteur industriel à réluctance variable. Les pôles saillants du moteur pas-à-pas ont disparu (et avec eux le couple très irrégulier et le freinage aérodynamique). Les parties foncées sont des barrières de flux contenant une colle époxy (ce sont les parties claires du moteur ci-dessous, où on utilise un métal non magnétique).
Le MRV est principalement utilisé là où il faut de toute façon un variateur de fréquence (débit variable de pompes et de ventilateurs) ou là où l'ajout d'un variateur de fréquence améliore le système. Un exemple est le compresseur d'un gros groupe frigorifique: il peut travailler en tout-ou-rien ou en variation de fréquence où il permet un fonctionnement plus souple (et des économies). Pour récupérer l'investissement, il faut que le système fonctionne pratiquement en continu, par exemple dans la climatisation, les grands frigos industriels,... Le moteur permet à lui seul une économie de 6% sur la facture électrique. Le moteur à réluctance variable était déjà connu de certains professionnels, mais a reçu un regain d'intérêt quand on a appris que les moteurs des nouvelles voitures électriques de Tesla étaient équipées d'un tel moteur. Ce moteur n'a pû être mis sur le marché qu'avec l'apparition des variateurs de fréquence adaptés, mais actuellement il existe des moteurs qui fonctionnent avec un variateur classique: le marché est donc en forte évolution. Certains moteurs ont en effet une cage d'écureuil en aluminium, ce qui permet un démarrage direct sur le réseau. Ce type de moteur peut être branché à un variateur de fréquence classique et est est moins adapté aux les variateurs de fréquence spécifiques, car la forme non-sinusoïdale des courants produit des pertes dans les barres.
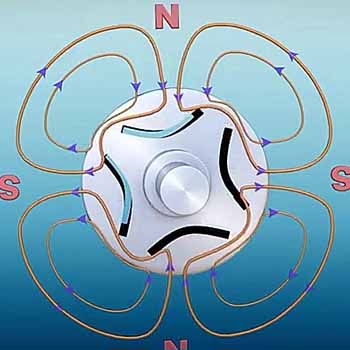
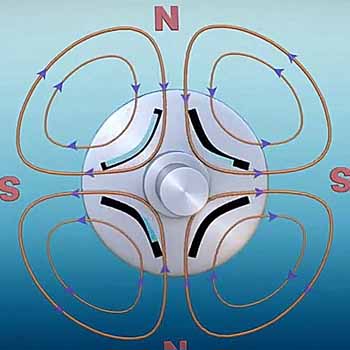
Moteurs de voitures électriquesLes moteurs utilisés dans les voitures électriques qoivent avoir des capacités particulières. De là dépend la facilité d'utilisation et l'autonomie du véhicule. Quand le rendement du moteur augmente de 1%, cela augmente l'autonomie de la voiture d'une dixaine de kilomètres.Mais on oublie ici bien sûr de mentionner que lors de la charge, on perd directement plus de 10% (jusqu'à 25% dans le cas de certaines voitures). Il est vrai que ces chiffres désastreux ne se retrouvent dans aucunes statistiques; le constructeur n'affiche que l'autonomie maximale de la voiture dans les meilleures circonstances, mais n'indique pas que pour charger un accu de 50kWh, tu as en fait payé 60kWh! Bon, revenons-en à nos voitures. Le moetur doit avoir un couple élevé, surtout aux basses vitesses, et avoir une plage de fonctionnement élevée. Les images à droite représentent le rotor d'un moteur de voiture électrique. Le stator a 4 pôles (mais il existe également des moteurs à 6 pôles). Le moteur à aimants permanents a le meilleur rendement aux basses vitesses: un couple très élevé et pas de glissement (qui produits des pertes). Mais aux vitesses plus élevées, les aiments produisent une force contre-électromotrice dans les bobinages. Cette force contre-électromotrice produit une tension induite dans le bobinage qui s'oppose à la tension appliquée aux bobinages par l'électronique de puissance. C'est en fait comme si la tension appliquée au bobinages du stator diminuait: le couple du moteur diminue avec la vitesse. Le moteur à réluctance variable n'a pas d'aimants et ne produit pas de force contre électromotrice. Le couple reste pratiquement constant à toutes les vitesses. Pour avoir des accélérations puissantes et un couple qui reste élevé aux hautes vitesses, on va combiner les deux systèmes. Le moteur des dernières voitures Tesla a ainsi à la fois les fentes du moteur à réluctance variable et les aimants du moteur synchrone. Les aimants sont choisis pour avoir une très faible réluctance et se comportent comme une couche d'air: ces aimants peuvent ainsi être placés dans les fentes. Le moteur a en plus un capteur de position, et c'est ici que cela devient très interessant. En modifiant la phase du courant dans les bobinages par rapport à la position du rotor, on peut favoriser l'effet des aimants ou de la réluctance. Quand le conducteur met pied au plancher, l'électronique va favoriser l'effet des aimants (avec un rendement un peu moindre à cause de la force contre-électromotrice), tandis que quand le conducteur conduit "cool" le déphasage est tel que le moteur travaille en moteur à réluctance variable. La présence d'aimants dans le rotor fait que le moteur peut aisément travailler en alternateur pour récupérer l'énergie (frein moteur à récupération). C'est la force contre électromotrice qu'on veut éviter lors de l'accélération qu'on utilise ici lors du freinage. Il n'y a pas que Tesla qui utilise ce type de moteur. Toyota (et probablement d'autres fabricants)utilise le même principe dans ses voitures hybrides, mais Toyota est moins à la mode que Tesla. |

 Certains moteurs à réluctance variable (MRV) peuvent être alimentés en triphasé "normal", mais nécessitent toujours un variateur. Les moteurs les plus récents n'ont plus besoin de commande indépendante de chaque bobinage (la commande classique avec trois fils est possible).
Certains moteurs à réluctance variable (MRV) peuvent être alimentés en triphasé "normal", mais nécessitent toujours un variateur. Les moteurs les plus récents n'ont plus besoin de commande indépendante de chaque bobinage (la commande classique avec trois fils est possible).

Publicités - Reklame