| Le moteur pas à pas fait partie de la famille des moteurs synchrones dont la vitesse est déterminée par la fréquence. La plupart des moteurs pas à pas sont basés sur la réluctance variable. |
-
Moteurs à réluctance
|
La réluctance est la résistance magnétique d'un circuit. Le champ magnétique tente de réduire cette résistance, par exemple en attirant une plaque de métal pour réduire l'entrefer. Les électro-aimants sont basés sur ce principe.
La réluctance, c'est en fait le contraire de la perméabilité magnétique: l'air est peu conducteur du champ magnétique: il a une réluctance élevée et une perméabilité très faible
En envoyant du courant dans un des bobinages (par exemple les bobines indiquées "C") les pôles saillants du rotor sont attirés en face du bobinage magnétisé et le rotor tourne d'un "pas" dans le sens des aiguilles d'une montre. Si on alimente les bobines "D", le moteur va tourner d'un pas dans le sens inverse.
A droite, la construction d'un moteur à réluctance variable de petite puissance et de basse vitesse (nombre important de pôles). Les pôles saillants limitent la vitesse maximale à cause du freinage de l'air. On remplit souvent les creux avec un métal non ferromagnétique ou de l'époxy.
Moteur pas à pas ou moteur à réluctance variable?Les deux moteurs sont basés sur le même principe et on pourrait en théorie interchanger les deux noms. En pratique on fait une nette différence:
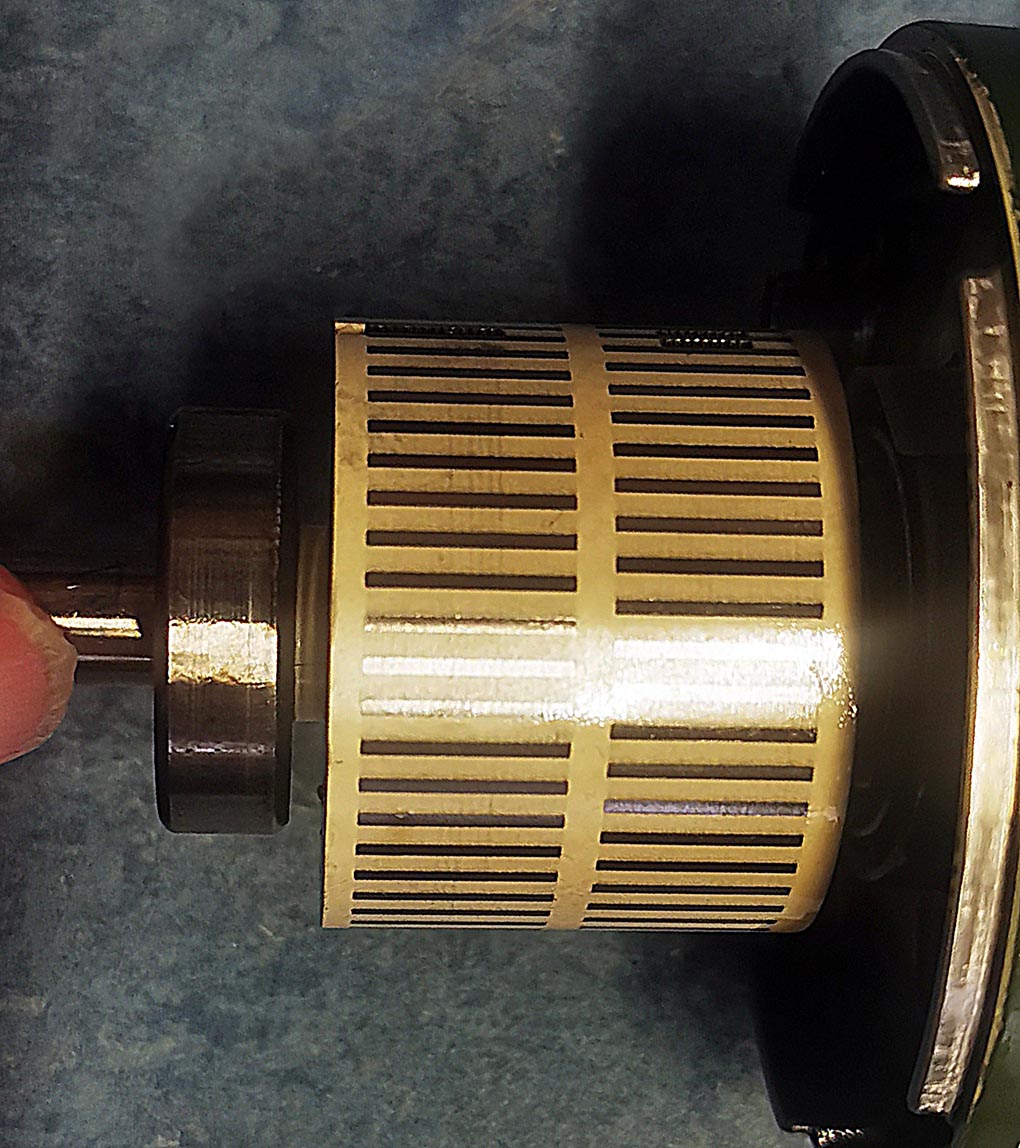
Le moteur à droite est utilisé comme moteur pas à pas sur les chasseurs de mines de la Marine belge, néerlandaise et francaise. Le moteur commande le woodward. Le woodward compare la vitesse de rotation demandée (selon la position du moteur pas à pas) à la vitesse effective (mesurée sur l'axe du moteur) et adapte le débit de carburant pour arriver à la vitesse de consigne. Ce moteur est équipé d'un petit aimant permanent (on le voit sur le haut de l'agrandissement du rotor) qui sert à bloquer la position du moteur quand il n'est pas alimenté, pour éviter que la valeur de consigne ne change à cause des vibrations du moteur diésel. Le couple du moteur est plus fort que le couple de l'aimant permanent: l'aimant n'enpèche pas le rotor de tourner s'il est commandé.
Les moteurs pas à pas sont souvent commandés électroniquement. Dans les applications les plus courantes (moteurs d'imprimante, de scanner, moteur dans des appareils médicaux, etc) la commande se fait avec un signal carré. Ce signal produit des variations de couple importantes et un bruit caractéristique. Dans les applications où une puissance plus élevée est nécessaire, on alimente les bobinages avec un courant sinusoïdal, le courant de chaque bobinage étant déphasé. Les moteurs synchrones (pas à pas, à réluctance variable ou à aimants) permettent également un frein moteur efficace en alimentant en permanence un ou deux bobinages. Le moteur à réluctance variable ne peut pas fonctionner comme générateur, puisque le magnétisme du rotor n'est pas permanent.
Pour produire un champ tournant, il faut exciter le pôle statorique (courant I) au moment où le pôle du rotor se dirige vers lui, donc avant le pic de l'induction. Quand on remarque la "courbe" du courant dans un bobinage, on voit qu'il ne correspond absolument pas au courant alternatif triphasé. On utilise un signal carré (qui est plus facile à réaliser avec un hacheur) mais on peut tout aussi bien utiliser une courbe de gauss qui réduit les variations de couple. La polarité du courant ne joue en principe aucun rôle, c'est l'intensité du courant qui est déterminante. Il faut simplement produire un champ magnétique, mais qu'il soit N-S ou S-N ne joue aucun rôle. Pour les basses vitesses et basses puissances, il est possible de se passer d'un capteur de position: l'électronique force le moteur pas-à-pas dans une position donnée. Si la charge est trop importante ou si on veut faire accélérer le moteur trop rapidement, il saute un pas.
Le moteur pas à pas a un couple très variable, qui peut être compensé par une commande électronique adaptée. En plus il y a saturation magnétique dans les deux coins des poles qui sont opposés, ce qui limite le champ magnétique total, et donc le couple instantané. La variation de couple d'un tel moteur est très importante et produit des vibrations audibles, surtout si la commande du moteur n'est pas parfaitement adaptée. Ce type n'est pas utilisé pour les grandes puissances: on utilise alors des moteurs à réluctance variable. |

 A gauche, on voit l'induction (H) de chaque pôle selon la rotation du rotor (il s'agit d'un moteur à 6 pôles statoriques, donc trois bobinages). L'induction est maximale quand l'entrefer est minimal, donc quand le pôle saillant du rotor se trouve en face du pôle du stator.
A gauche, on voit l'induction (H) de chaque pôle selon la rotation du rotor (il s'agit d'un moteur à 6 pôles statoriques, donc trois bobinages). L'induction est maximale quand l'entrefer est minimal, donc quand le pôle saillant du rotor se trouve en face du pôle du stator.

Publicités - Reklame