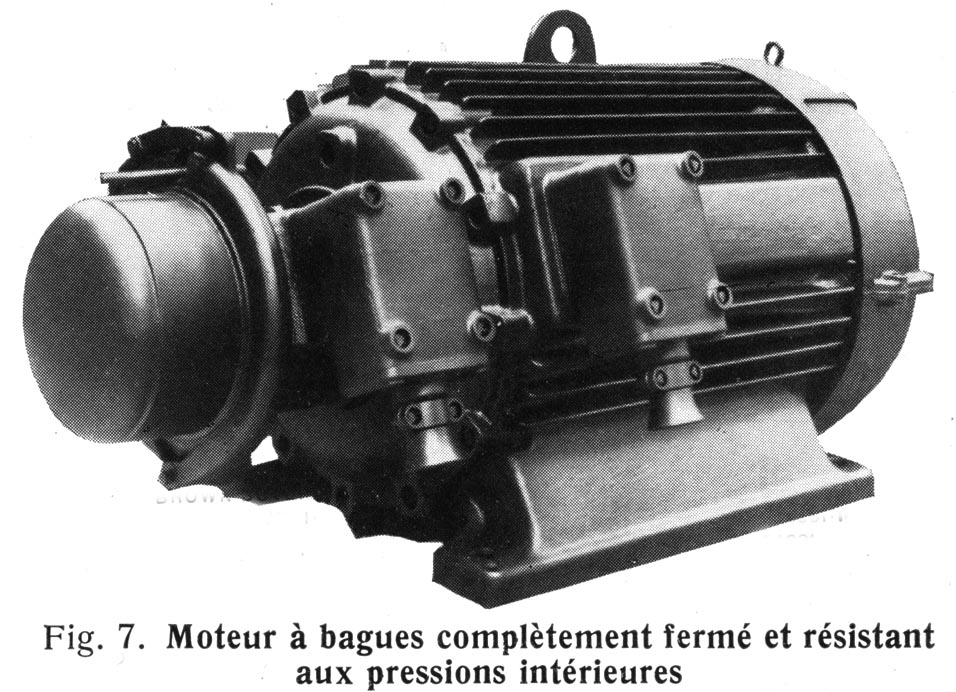
| Le moteur asynchrone existe en version à cage bobinée qui permet un fonctionnement plus souple. |
-
A droite un moteur asynchrone à cage bobinée industriel. Il a un bornier supplémentaire qui est relié aux contacts du rotor.
Quand un moteur asynchrone démarre, la cage d'écureuil forme pratiquement un cours-circuit. Le moteur se comporte donc en fait comme un transformateur avec secondaire (la cage d'écureuil) en cours circuit. L'appel de courant est donc très fort (il peut atteindre 10× le courant nominal). Pour réduire le courant dans le primaire, heuh, le stator, on va augmenter la résistance du rotor. On peut le faire avec une cage résistive ou en utilisant deux cages, mais alors on a continuellement des pertes et le moteur manque de puissance.
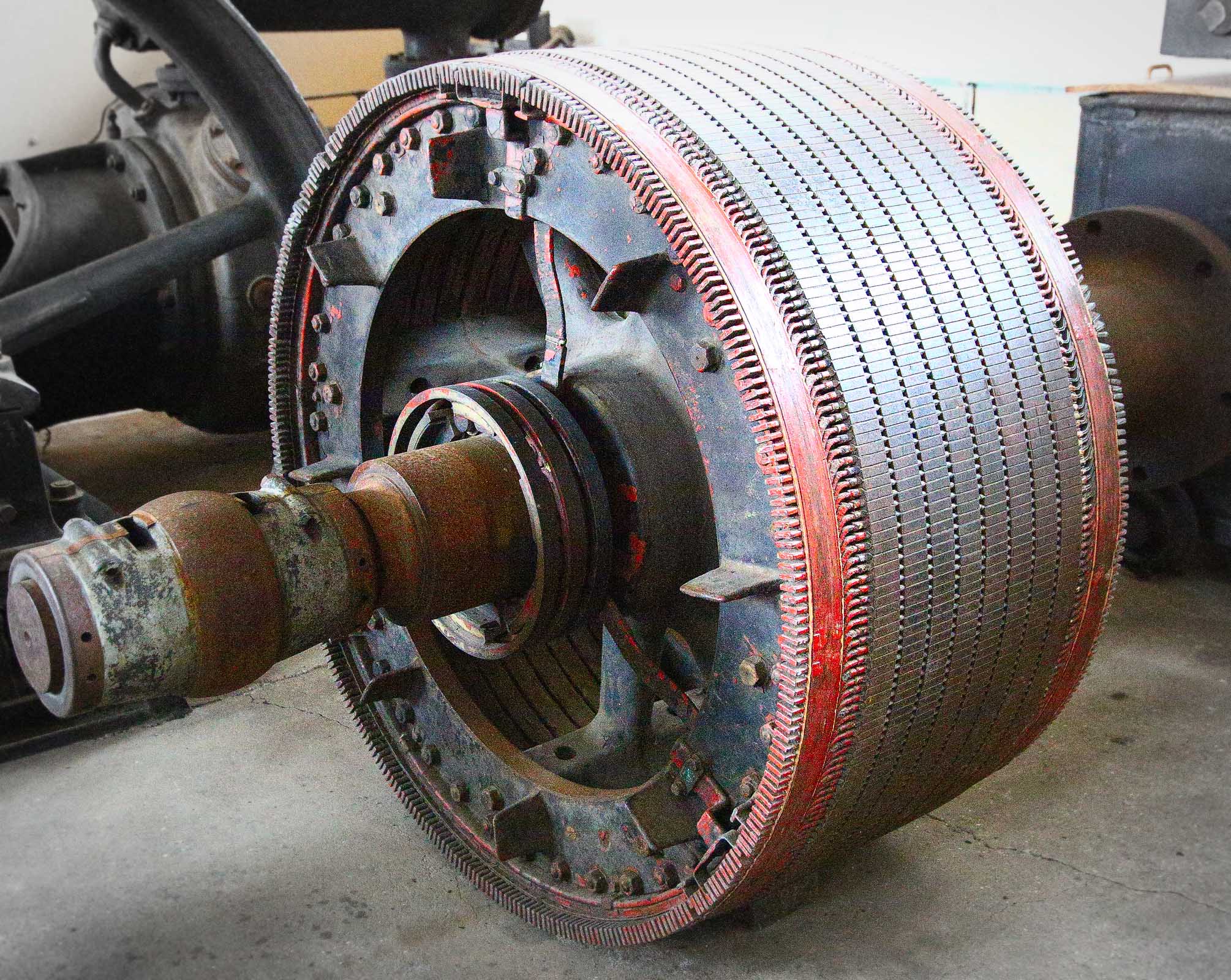
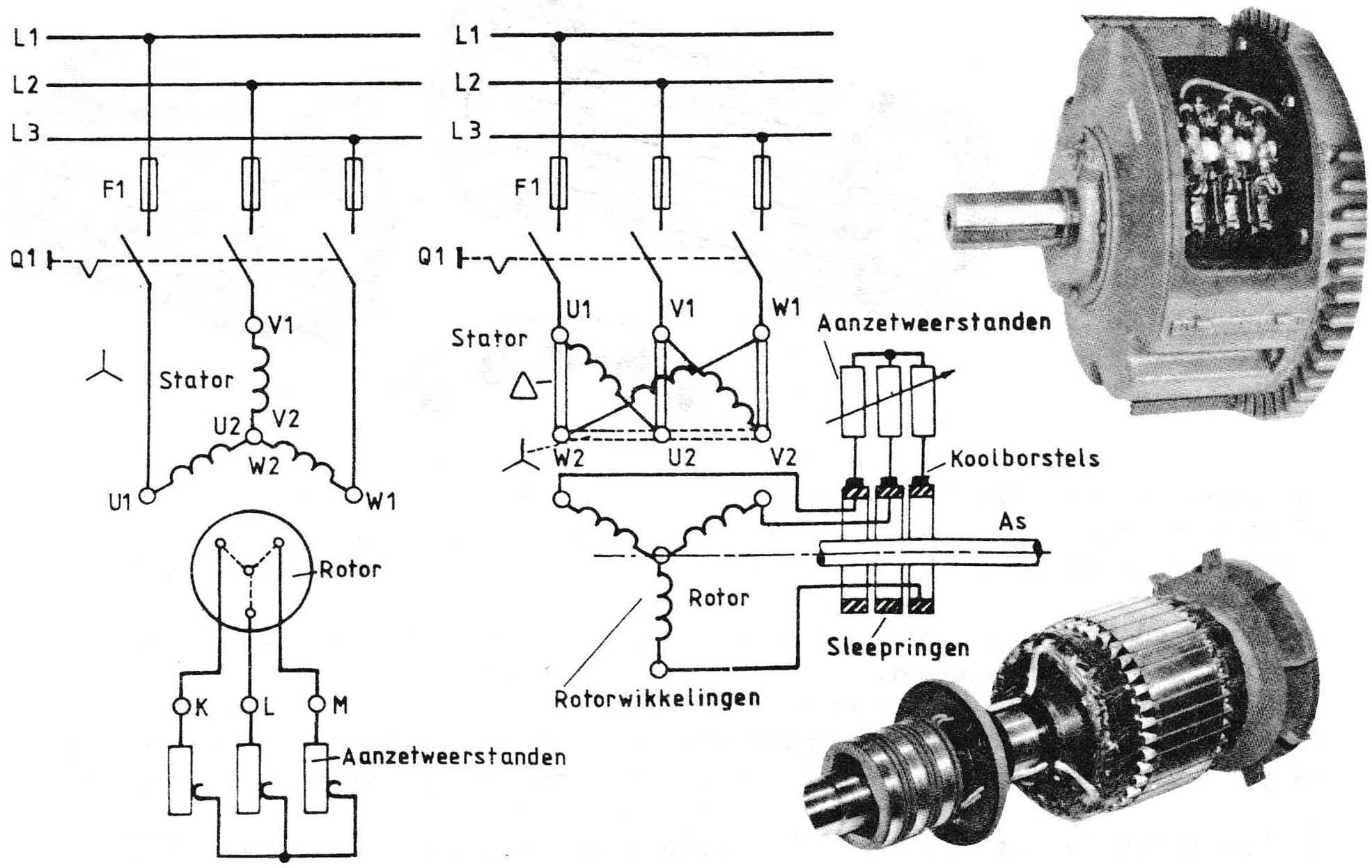
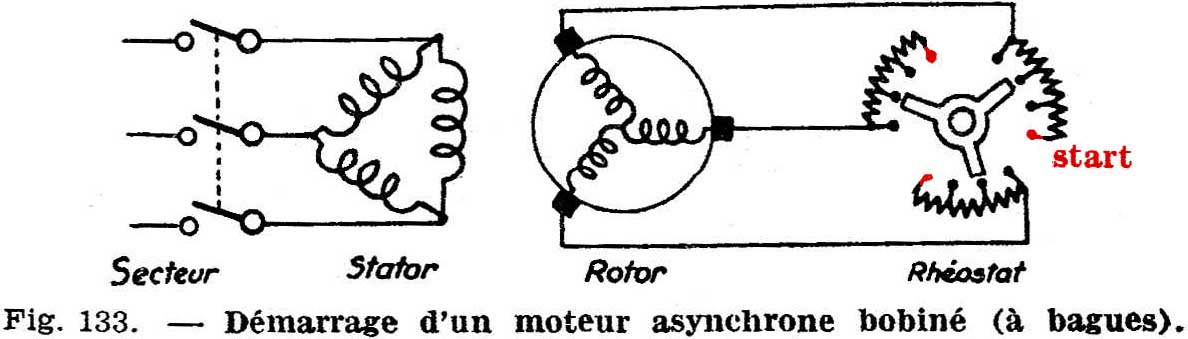
Pour moduler l'appel de courant, on va utiliser des bobinages rotoriques et on place des résistances dans le circuit pour limiter le courant. Dans les moteurs à fonctionnement automatique, des contacteurs centrifuges placés sur le rotor cours-circuitent les résistances (placées également sur le rotor). Dans les constructions les plus classiques, les résistances sont placées à l'extérieur et le courant est transmis par trois bagues et des balais. Pour un fonctionnement souple, le rotor est souvent bobiné en triphasé. Sur la photo à droite, on voit bien deux des trois barres qui transmettent le courant du rotor aux anneaux.
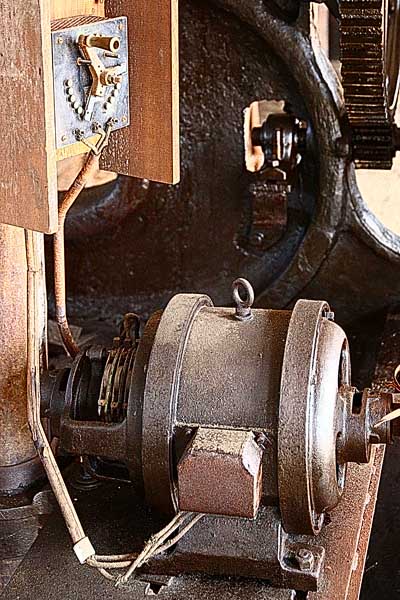
Le stator d'un motor à cage bobinée est identique à celui d'un moteur asynchrone classique. Les photos proviennent du musée minier de Lewarde, le moteur entrainant un compresseur pour fournir l'air comprimé utilisé par les marteaux-piqueurs dans la mine. Au fond de l'image du stator (seconde photo à droite) on voit le rhéostat permettant de régler la puissance au démarrage. Une fois le moteur à sa vitesse de fonctionnement nominale, les résistances sont cours-cirtuitées. Sur la page de l'écluse de Ittre on peut voir un moteur asynchrone à cage bobinée utilisé pour commander les portes levantes. Il y a un moteur dans chaque portique.
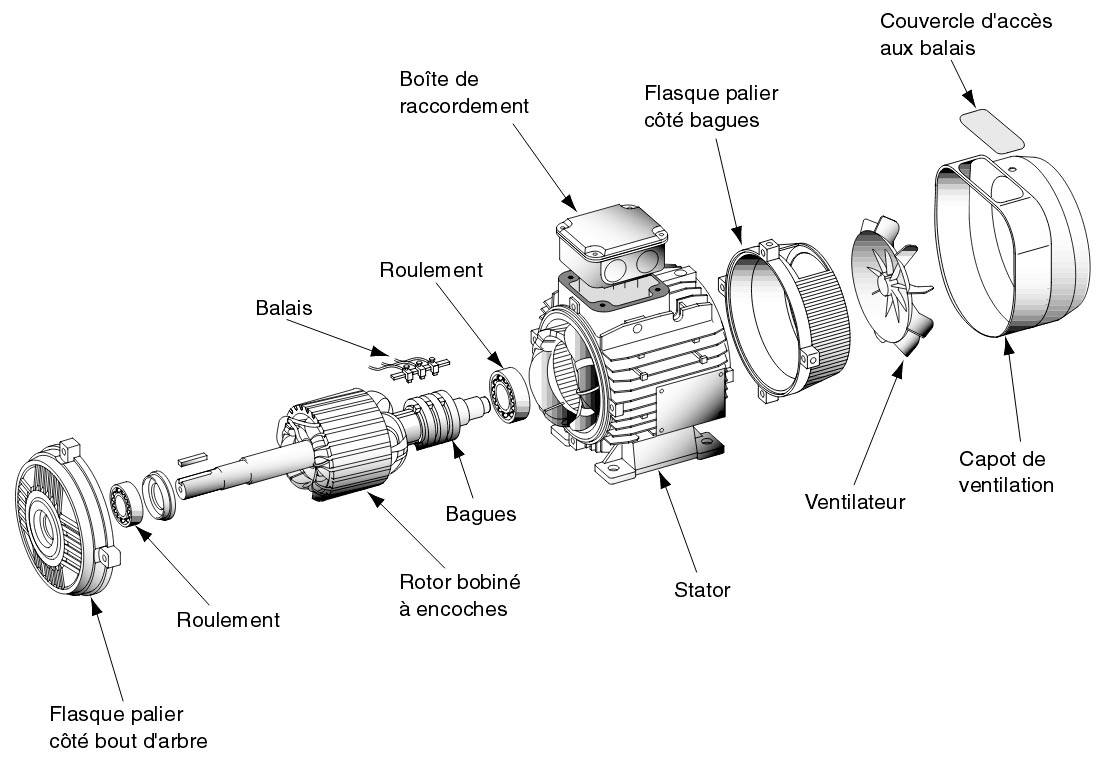
Quel est l'avantage d'utiliser des résistances sur le rotor? Pourquoi ne pas limiter le courant par des résistances au stator? L'inconvénient des balais est connu: les balais et les anneaux s'usent. Par contre le courant rotorique est moins important, ce qui permet d'utiliser un rhéostat de petite taille. Avec les résistances au stator, un moteur de 200kW (environ la puissance du compresseur de Lewarde) aurait nécessité un rhéostat de 200kW. Ici un rhéostat de 5kW suffit amplement. On aurait également pu utiliser un auto-transfo variable à la place des résistances du stator, mais un tel transfo nécessite un entretien régulier et est très cher (surtout qu'il faut un autotransfo variable triphasé). Mais ce qui joue surtout en faveur des résistances au rotor, c'est que le couple au démarrage est nettement plus important lors d'un démarage rotorique. Le dernier exemple à droite est un moteur asynchrone triphasé à rotor bobiné. Les résistances du rotor sont mises en cours-circuit une fois le moteur arrivé à sa vitesse nominale. La tension sur les résistances est relativement faible (et le circuit est isolé du réseau électrique), il ne faut pas de protection et les contacts sont à nu. Les résistances sont mises hors fonction manuellement quand le moteur monte en régime, mais il est également possible d'utiliser un système automatique basé sur la force centrifuge pour cours-circuiter les résistances. Certains moteurs ont les résistances et le contact centrifuge montés sur le rotor, ce qui permet d'éviter les contacts glissants. Les résistances rotoriques sont petites et la tension produite au rotor ne dépasse pas une dixaine de volts pendant le démarrage. Le rotor agit comme secondaire d'un transfo dont la tension chûte quand la vitesse augmente. En utilisant peu de spires de gros fil, on a un "secondaire" dont la tension reste basse. De plus le rotor est isolé du réseau et il n'y a pas de risque que des tensions élevées apparaissent au rotor. A droite (dernier schéma), une page d'un cours d'électricité qui reprend tout ce que vous devez savoir sur les moteurs à cage bobinée: le branchement, une vue des balais qui frottent contre les anneaux (partie du moteur) et une vue du rotor.
Si la charge est relativement constante, on peut utiliser les résistances pour varier la vitesse de rotation du moteur, ce qui n'est pas possible en modifiant la tension d'alimentation du moteur. Quand on réduit la tension d'alimentation d'un moteur asynchrone classique, le glissement devient un peu plus important, le courant dans le rotor augmente et par l'effet du transformateur, le courant du stator augmente également. En fin de compte la puissance dissipée est la même. On voit un bout de courbe R=0 qui correspond à la courbe vitesse/couple du moteur asynchrone normal. Plus la résistance est élevée, et plus la vitesse est faible. La vitesse varie plus selon les changement de couple quand la résistance est élevée (trait violet). Quand il n'y a pas de résistance, la vitesse de rotation ne varie que très peu selon la charge. Pour une charge constante, on peut utiliser les résistances pour varier la vitesse du moteur. Même si on laisse les résistances en fonction (utilisation à vitesse plus basse), la dissipation dans les résistances est limitée (elle dépend du courant dans le rotor et donc du glissement, qui dépend lui de la charge). Pour éliminer la variation de la vitesse selon la charge et pour réduire les pertes à basse vitesse on utilisait un montage Scherbius (uniquement pour les puissances élevées). Si les résistanes sont interrompues (mauvais contacts dans le rhéostat ou les balais), le moteur ne démarre pas, c'est comme si le rotor n'avait pas de bobinage. Le moteur se comporte comme un transfo dont le secondaire n'est pas connecté. Il n'y a aucun risque de surchauffe, puisqu'il n'y a aucun courant qui circule dans le "secondaire" (le rotor). Ce n'est que s'il y a un cours-circuit dans les bobinages ou contacts du rotor qu'un courant très important peut circuler, surtout si le moteur est à l'arrêt. Le courant de démarrage peut dépasser les limites. Le moteur basé sur le principe de Scherbius permet de récupérer l'énergie dissipée dans les résistances de démarrage. Le démarrage étoile-triangle est actuellement utilisé à la place des moteurs à cage bobinées pour les puissances faibles à moyennes. C'est le système de démarrage le plus simple, mais le couple au démarrage est faible. Si le démarrage est laborieux, on utilise un variateur électronique de vitesse. Le moteur avec cage d'écureuil bobinée ressemble fortement à la machine asynchrone à double alimentation utilisée comme alternateur asynchrone. Si la forme générale est la même, le fonctionnement est différent: la tension générée est prélevée sur le stator, tandis que le rotor sert à créer le champ tournant. |


Publicités - Reklame