| Le moteur asynchrone est le type de moteur le plus utilisé, principalement dans l'industrie. Il existen en plusieurs versions, dont certaines sont moins utilisées actuellement. |
-
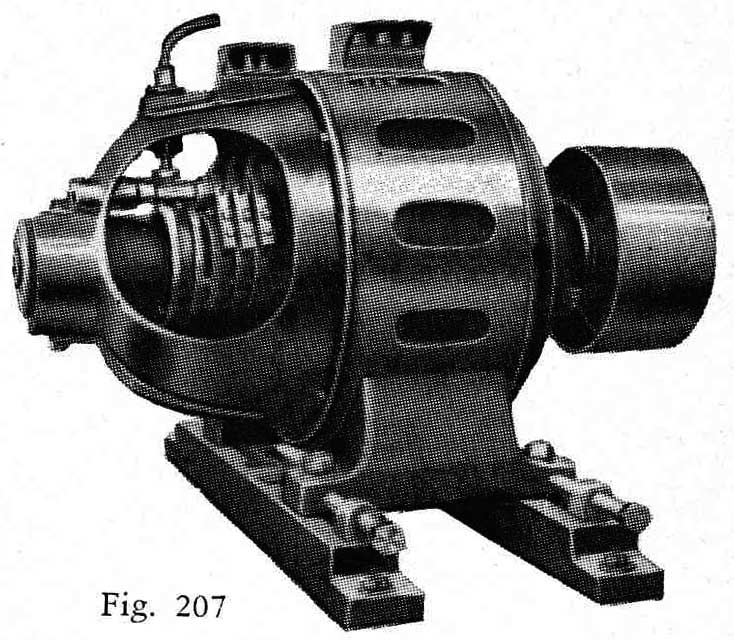
 Les premiers moteurs à induction (moteurs asynchrones): un moteur de Ferraris qui utilise presque la forme moderne des pôles du stator. Dans les moteurs modernes on étale les pôles pour avoir un couple plus constant (voir moteurs et générateurs à enroulements répartis). Il utilise par contre un rotor en cuivre plein. Le cuivre n'est pas magnétique et ne concentre pas le champ magnétique.
Les premiers moteurs à induction (moteurs asynchrones): un moteur de Ferraris qui utilise presque la forme moderne des pôles du stator. Dans les moteurs modernes on étale les pôles pour avoir un couple plus constant (voir moteurs et générateurs à enroulements répartis). Il utilise par contre un rotor en cuivre plein. Le cuivre n'est pas magnétique et ne concentre pas le champ magnétique.
Le moteur de Tesla (l'original, pas ce qu'on trouve dans certaines voitures électriques) utilise un stator en forme d'anneau qui oblige à avoir un entrefer très important à cause du bobinage. Mais ce moteur utilise déjà un rotor bobiné. En jaune le champ magnétique. Le champ doit sortir de l'anneau (champs opposés) et passe par le rotor. A cette époque, on ne savait pas encore très bien s'il fallait utiliser le courant diphasé ou le courant triphasé. Le courant biphasé était vu comme le successeur logique au courant monophasé. Le courant triphasé a comme avantage qu'il permet un transport de puissance plus élevé avec moins de fils conducteurs. De plus, la puissance instantanée est toujours constante.
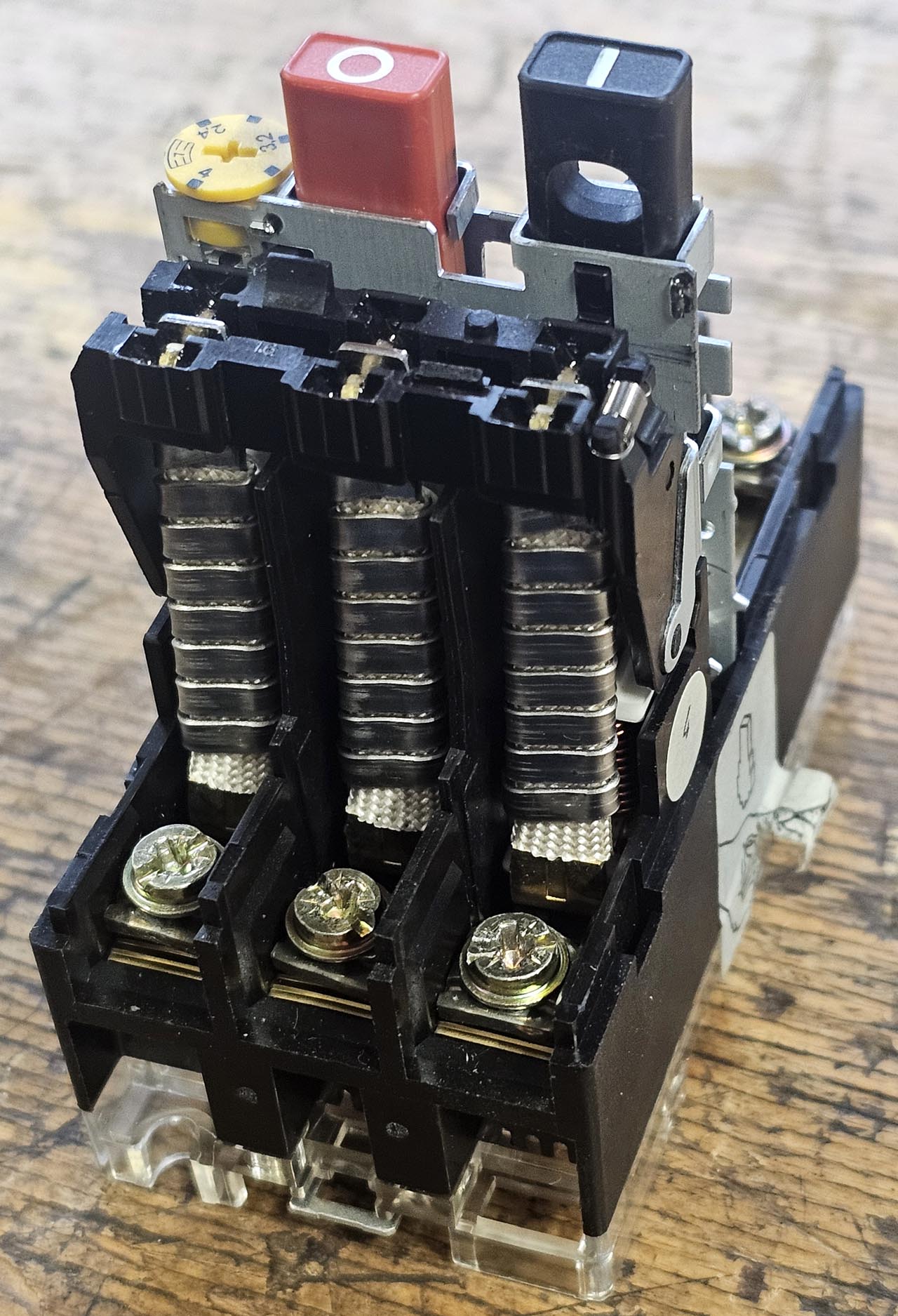
Le branchement d'un moteur asynchrone triphasé sur le réseau monophasé est montré ici (montage steinmetz). Le moteur à répulsion-induction est un moteur qui a les caractéristiques d'un moteur universel au démarrage et d'un moteur asynchrone à la vitesse nominale. Le glissement du moteur à inductionUn moteur asynchrone a toujours un glissement, contrairement à un moteur synchrone. C'est le glissement qui produit le champ rotorique. C'est donc une caractéristique propre au moteur à induction.Pour se rendre compte de ce glissement, il faut alimenter le moteur en continu (le champ tournant est alors fixe). On utilisera environ 24V continu pour un moteur 240V, une phase au positif et les deux autres phases a négatif. La tension plus basse est nécessaire, car il ne faut pas établir un champ magnétique variable: le courant n'est limité que par la résistance ohmique des bobinages et pas par la self-induction du bobinage statorique. Quand on branche le courant continu, il devient très difficile de faire tourner le moteur, mais en comparaison d'un moteur synchrone, le moteur ne se bloque pas dans une certaine position. La force de freinage croit linéairement avec la vitesse de rotation du moteur (et avec la tension appliquée). L'énergie qui est absorbée par le moteur pendant le freinage est dissipée sous forme de chaleur dans le rotor. On utilise cette possibilité pour freiner un moteur asynchrone de façon progressive et proportionelle au courant dans le bobinage. Contrairement à un frein mécanique, il n'y a pas d'usure mécanique (plaquettes de frein). Un tel type de freinage a également été utilisé dans certains poids lourds. Quand on alimente le moteur en alternatif (à champ tournant), la force de freinage devient une force motrice. Interrupteur-disjoncteur pour moteur asynchroneL'appel de courant au démarrage d'un moteur asynchrone est beaucoup plus important que le courant nominal et nécessite l'utilisation d'un disjoncteur temporisé.
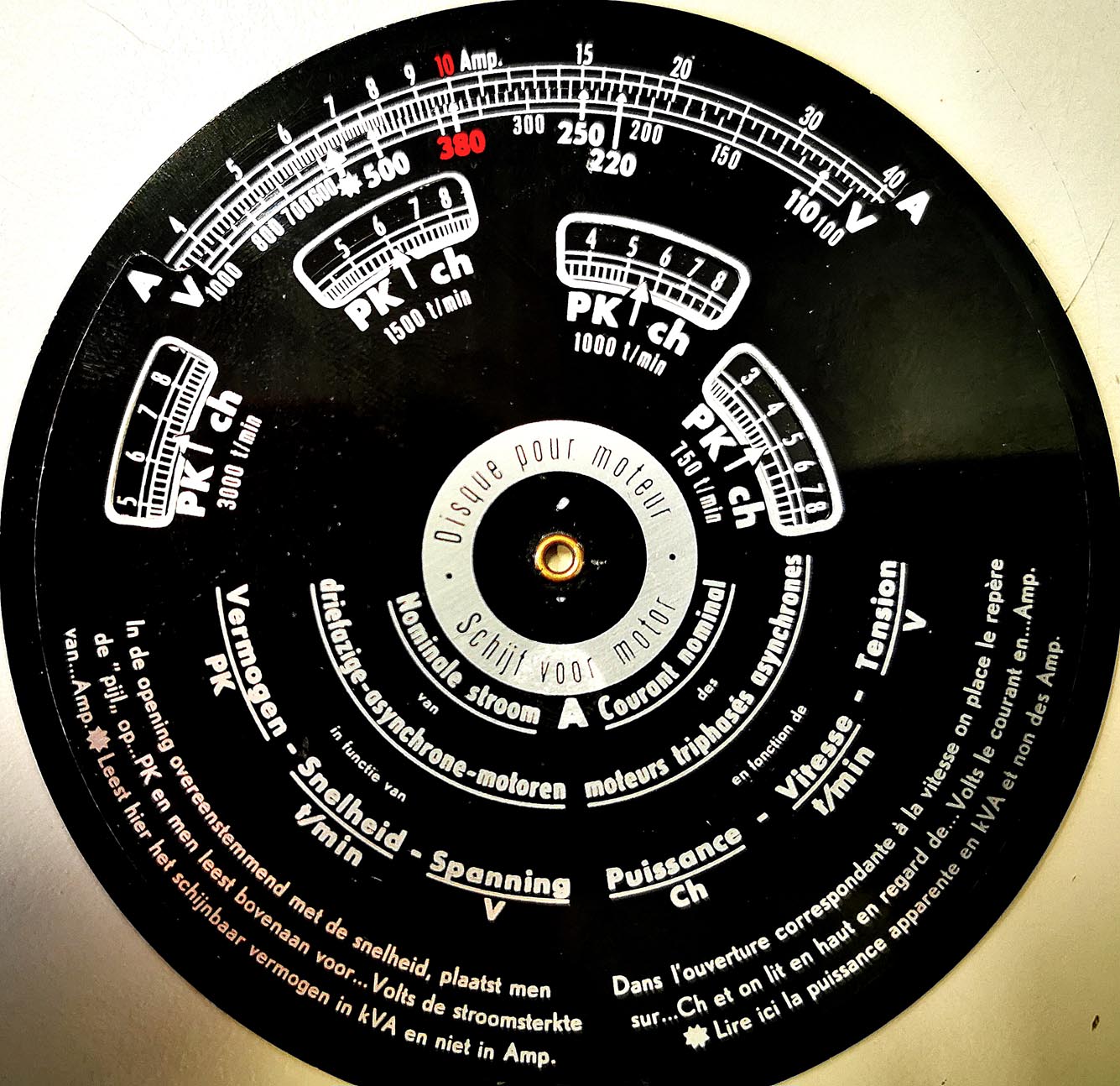
On règle une fois pour toutes le courant maximal du moteur (ici entre 10 et 16A et 2.4 et 4A dans le second disjoncteur). C'est le courant maximal que le moteur tire en fonctionnement normal. Si le démarrage est trop laborieux et que le courant maximal est dépassé pendant plusieurs secondes, la protection thermique entre en action. C'est également le cas quand la charge du moteur reste constamment trop élevée. L'échauffement du bilame dans le disjoncteur par le courant qui va au moteur correspond à l'échauffement du moteur même. Les 3 petits bobinages sont parcourus par les 3 phases du moteur et chauffent les bilames. Le moteur n'a donc plus besoin de protection thermique propre, elle se trouve dans l'interrupteur même. Une protection thermique dans le moteur peut malgré tout être nécessaire si le moteur est refroidi ou réchauffé (par exemple un circulateur d'eau chaude). Il y a également un déclenchement magnétique en cas de cours-circuit (déclenchement immédiat à partir d'un courant de 192A). Le déclenchement magnétique est également utilisé dans les disjoncteur ménagers. Disque de calcul pour moteur asynchroneA droite disque de calcul de la puissance d'un moteur asynchrone triphasé. On règle le disque sur la puissance voulue et la vitesse de rotation (par exemple 6CV en 1500 tours) et on voit en face de la tension de secteur (ici 380V) l'ampèrage du moteur (10A).On voit que les moteurs tournant à 3000 tours (en fait un peu moins puisqu'il s'agit de moteurs asynchrones) ont un meilleur rendement que les moteurs tournant plus lentement (avec le double ou le triple de pôles). Mais même avec le rendement moins bon, il est souvent plus interessant d'utiliser un moteur de 750 tours que d'utiliser un réducteur qui produit des pertes mécaniques plus importantes. Le réducteur permet par contre un couple au démarrage plus puissant, donc une solution donnée n'est pas la meilleure dans tous les cas. |

Publicités - Reklame