|
Les moteurs asynchrones sont le type de moteur le plus souvent utilisé, car c'est le type de moteur le plus simple et le plus fiable.
Les moteurs asynchrones (en fait subsynchrones ou hyposynchrones) peuvent fonctionner en générateur hypersynchrone si on les fait tourner plus vite que la vitesse de synchronisme. |
-
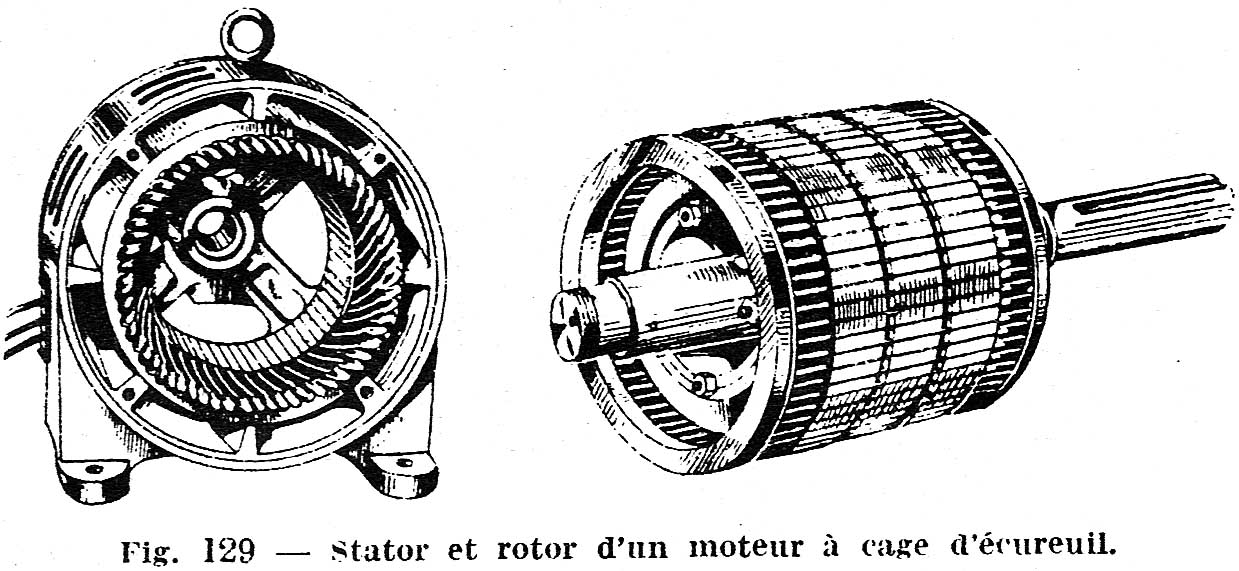
Le moteur à droite montre la forme typique d'un moteur asynchrone en construction blindée à ventilation extérieure. Le moteur a un capot du coté du ventilateur pour envoyer l'air sur la surface externe du moteur. Le rotor mui-même a des ailettes pour produire une circulation de l'air dans le moteur même. Le rotor chauffe fortement en charge. La puissance d'un moteur asynchrone peut aller jusqu'à plus de 50kW. Pour des puissances plus élevées on préfère un autre type de moteur qui a un rendement plus élevé.
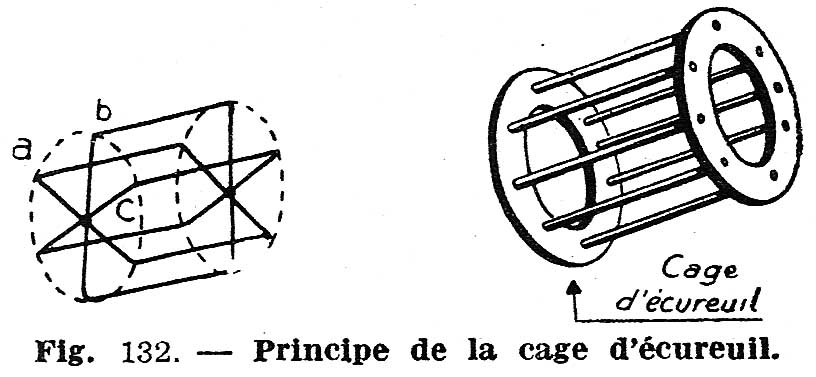
Fonctionnement du moteurQuand on met un conducteur en cours-circuit dans un champ magnétique alternatif, il se développe un courant dans ce conducteur. Dans de nombreuses applications on essaie de réduire ce courant (courant de Foucault), par exemple en utilisant des fines toles isolées au lieu d'utiliser du fer d'une seule pièce dans les transformateurs et autres appareils. Ici, on va utiliser ce courant induit (c'est pour cela que le moteur est également appelé moteur à induction). Ce courant produit notament un champ magnétique inverse qui va déformer le champ du stator et forcer le moteur à tourner. Ce champ induit peut être très puissant, car le conducteur est en cours-circuit et le courant induit est important.Le principe du fonctionnement du moteur asynchrone est basé sur la création d'un champ magnétique dans le rotor. Quand le champ statorique varie, le champ rotorique varie également, puisque le rotor est englobé par le champ magnétique du stator. Si on met un bobinage en cours-circuit dans le champ du rotor, il se comporte comme le secondaire d'un transformateur (tant que le moteur ne tourne pas). Un courant très important apparait dans le bobinage, et celui-ci produit à son tour un champ magnétique qui est inverse au champ primaire. Sans bobinage dans le rotor, il n'y a pas de moteur: les caractéristiques du moteur dépendent des caractéristiques du bobinage du rotor. Par la réaction d'induit, le rotor produit un champ magnétique qui s'oppose aux variations du champ tournant statorique. Ce champ a la polarité inverse et les pôles contraires s'attirent. Un pôle positif au stator produit un pôle négatif au rotor en face de celui ci. Mais le champ magnétique n'est pas fixe, il tourne car le moteur est alimenté en triphasé. Le champ secondaire (du rotor) à tendance à suivre le champ primaire et le rotor se met à tourner. La vitesse du moteur ne va pas augmenter jusqu'à la vitesse du synchronisme, car à ce moment il n'y a plus de champ magnétique variable dans le rotor, et donc plus d'induction. La vitesse du moteur augmente jusqu'à environ 95% de la vitesse de synchronisme et diminue selon la charge du moteur (le type de bobinage du rotor détermine également la vitesse de rotation en charge du moteur). Ce type de moteur ne peut donc jamais s'emballer, ce qui est un grand avantage. L'induit se compose de gros brins de cuivre pour avoir un courant important (et donc également une forte réaction d'induit). En pratique l'induit a la forme d'une cage d'écureuil. Pour augmenter le champ magnétique, la cage est noyée dans le rotor qui se compose de feuillets de tôle fine facilement magnétisable pour éviter les courants de foucault. Le rotor d'un moteur asynchrone ressemble en fait à un rouleau à patisserie. On fabrique des moteurs avec des caractéristiques différentes en modifiant la forme des barres: rondes, triangulaires, trapézoïdales,... Il existe également des moteurs à cage d'écureuil double, une normale et une résistante pour le démarrage. La gravure 1 montre le principe de la cage d'écureuil et la gravure 2 la réalisation pratique. La cage d'écureuil a des barreaux obliques pour obtenir un couple constant quel que soit la position du rotor (fonctionnement sans à-coup). On remarquera la similitude du stator d'un moteur asynchrone avec celui d'un moteur synchrone. On peut transformer un moteur asynchrone en moteur synchrone en remplaçant le rotor. Les moteurs synchrones qui n'ont pratiquement pas de couple au démarrage ont souvent une cage d'écureuil pour démarrer comme un moteur asynchrone. Quand la vitesse se rapproche du synchronisme, le moteur synchrone prend le dessus: en effet le couple du moteur asynchrone est nul (c'est comme si la cage d'écureuil n'existait pas) quand le moteur est en synchronisme. Pour faire apparaitre une réaction d'induit, il faut un glissement, et celui-ci est nul en synchronisme. Il est a noter que le rotor n'a pas de champ magnétique intrinsèque: c'est la réaction d'induit qui produit ce champ. On profite de cette caractéristique dans les moteurs à commutation de pôles (moteurs dahlander). Les moteurs asynchrones ont besoin d'un champ tournant pour se mettre à tourner. Mais comment peut-on créer che champ tournant quand on ne dispose que du monophasé? C'est la cage d'écureuil du rotor qui détermine les caractéristiques du moteur: on peut réaliser un moteur avec un couple élevé au démarrage, un couple élevé près de la vitesse nominale ou un couple moyen à toutes les vitesses.
Freinage d'un moteur asynchroneUne manière très aisée de freiner les moteurs asynchrones, c'est d'appliquer une tension continue aux bobinages (environ 1/10 de la tension nominale, selon la puissance de freinage voulue). Cette tension va agir comme un frein très puissant. Contrairement au frein mécanique, le frein magnétique ne s'use pas.La tension continue n'agit pas comme frein mécanique et ne permet pas de totalement bloquer le moteur, le freinage est proportionel à la tension continue et la vitesse de rotation. En effet, l'induction dans le rotor n'est présente que tant que celui ci tourne (dans le champ statorique fixe). Ce type de freinage est simple mais ne permet pas de récupérer l'énergie cinétique.
Avantages et inconvénients des moteurs asynchrones
La plupart des inconvénients (sauf le rendement moyen) peuvent être éliminés: démarrage étoile-triangle, variateur de fréquence, cage d'écureuil adaptée à la charge du moteur.
Moteur de frigo ou surgélateurLe moteur asynchrone est par exemple utilisé dans le compresseur de frigos et surgélateurs. Il s'agit d'un moteur alimenté en monophasé, mais qui dispose d'un condensateur pour produire le champ tournant. Le moteur avec son couple relativement faible à basse vitesse ne peut démarrer qu'à vide, c'.à.d. quand la pression est équilibrée.Quand le compresseur vient de touner, il y a une forte différence de pression que le moteur n'arrive pas à vaincre. Le courant est alors très important, et un fusible thermique coupe l'alimentation pendant quelques minutes, le temps que la pression puisse s'égaliser. Les moteurs Dahlander sont décrits sur une page séparée. Ce sont des moteurs asynchrones qui peuvent tourner à deux vitesses. | ||||||||

Publicités - Reklame