| Le rotor du moteur asynchrone détermine en grande partie les caractéristique du moteur. Il est possible de modifier les caractéristiques d'un moteur en changeant de rotor. |
-
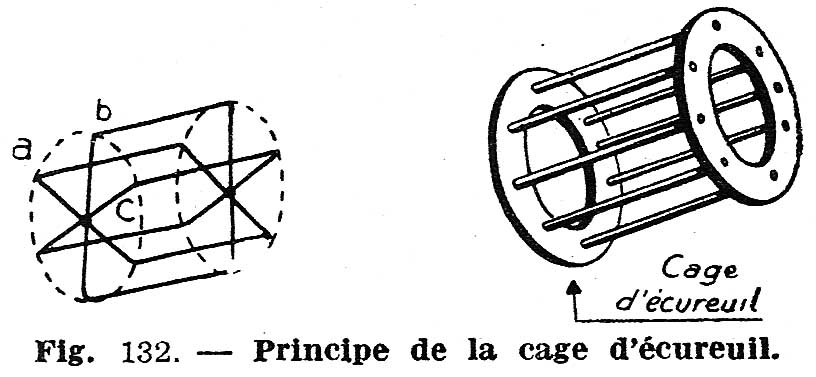
Les barreaux de la cage sont souvent en oblique pour éviter les à-coups du moteur quand une barre passe devant un pôle. Les spires de la cage d'écureuil ne sont pas nécessairement cylindriques: pour les puissances élevées on utilise de très gros barreaux en forme de trapèze. Cela permet un démarrage avec un appel de courant moindre, tandis que le couple est plus important quand on s'approche de la vitesse de synchronisme. Il utilise l'effet pelliculaire (skin effect): à l'arrêt ou aux faibles vitesses de rotation, le champ magnétique change rapidement (du point de vue du rotor) et grâce à l'effet pelliculaire le champ magnétique pénètre d'environ 1cm dans le cuivre. Quand on s'approche du synchronisme, le champ magnétique varie moins rapidement et l'effet pelliculaire disparait. Toute la barre de cuivre est maintenant utilisée et la résistance de la cage diminue fortement.
Bleu: rotor du moteur en feuillets de tôle (aisément magnétisable) Il existe également des moteurs avec double cage d'écureuil, une cage externe résistante pour le démarrage et une cage intérieure à gros barreaux en fonctionnement normal. Quand le glissement est important, la fréquence induite est élevée et le champ magnétique n'agit que sur la cage extérieure en laiton (plus résistante). La cage résistante est de plus en plus souvent réalisée en aluminium qu'on peut simplement couler dans les encoches. Plus la vitesse de rotation s'approche de la vitesse de synchronisme et plus le champ magnétique agit sur la cage intérieure composée de gros barreaux en cuivre.
A droite trois exemples de cages d'écureuil:
Un moteur à cage simple a un couple au démarrage nettement moindre que le couple à vitesse nominale. Ces moteurs sont idéaux quand le démarrage peut se faire à faible charge: pompes, ventilateurs, machines-outils démarrant à vide, etc. Ils sont moins recommandés quand le démarrage doit se faire en charge (compresseurs, ascenseurs). Les moteurs avec une cage d'écureuil double qui doivent être utilisés dans ce cas ont un moins bon rendement. Plus le glissement est important, et moins le rendement du moteur est bon. Le glissement produit en effet un courant de cours circuit dans le bobinage du rotor (quel qu'il soit): pour la partie "glissement", le moteur se comporte comme un transformateur dont le secondaire est en cours-circuit. Quand le moteur travaille à forte charge, le secondaire peut atteindre des températures très élevées.
AlternativesIl n'est pas possible d'éliminer ce glissement, le moteur asynchone est basé sur ce glissement pour fonctionner. Quand un rendement plus élevé est nécessaire, on utilise un autre type de moteur: un moteur synchrone ou un moteur à réluctance variable. Le premier moteur est fort cher (il utilise des aimants permanents ou une roue polaire qui doit être alimentée en courant) tandis que le second moteur nécessite un variateur de fréquence adapté.Les très gros moteurs qui fonctionnent en permanence sont souvent des moteurs synchrones (le surcout est compensé par le rendement plus élevé). Le moteur à réluctance variable est utilisé dans les applications permanentes où une vitesse variable est nécessaire (compresseurs et ventilateurs pour la climatisation). Il est également utilisé dans la dernière génération de voitures électriques où on profite de son très bon rendement. Le moteur à rotor bobiné permet de faire varier la résistance du rotor. Il n'est actuellement plus utilisé car les alternatives sont plus fiables. Si le démarrage est laborieux, on utilise maintenant un variateur électronique de vitesse à la place d'un moteur à rotor bobiné. |
Publicités - Reklame