Les moteurs synchrones, asynchrones et à réluctance variable ne fonctionnent que sur de l'alternatif. On les alimente en triphasé ou on produit un champ tournant avec un condensateur déphaseur.
Un moteur asynchrone a toujours un glissement, contrairement à un moteur synchrone ou un moteur à réluctance variable.
Les balais des moteurs
(et de certains générateurs)
|
|---|
Les moteurs à courant continu avaient de nombreux avantages: plus facile à régler la puissance (couple et vitesse). Même après la seconde guerre mondiale on a utilisé des moteurs à courant continu pour des applications spécifiques, comme les moteurs des ascenseurs des charbonnages qui doivent descendre très rapidement à grande profondeur (parfois plus de 1000m), mais qui doivent également pouvoir être positionnés à quelques centimètres. Dans ce cas on utilisait un gros moteur alternatif (triphasé) qui entrainait une dynamo qui produisait à son tour le courant continu pour le moteur de l'ascenseur (montage Ward Leonard).
Mais le courant continu avait un inconvénient de taille: il était difficilement transformable (d'une tension plus basse à une tension plus élevée pour le transport). Utiliser un convertisseur rotatif est possible pour une grosse usine, mais pas pour un particulier. On est donc passé à l'alternatif avant la seconde guerre mondiale. La plupart des moteurs sont donc des moteurs à courant alternatif.
Photo à droite: quand tu demandes à une "intelligence" artificielle de te dessiner un mouton moteur. Tout est raté (même pour ceux qui ne s'y connaissent pas en électricité: regardez l'axe du moteur). Et on s'étonne alors que le niveau dans les écoles techniques chute d'année en année? Je ne sais pas quelle drogue l'intelligence a prise pour dessiner le second moteur...
- Moteur asynchrone
- Le moteur asynchrone à cage d'écureuil est le moteur le plus utilisé. Notons deux versions spéciales du moteur asynchrone: le moteur dahlander (à commutation de pôles) et le moteur à cage bobinée.
On retrouve ce moteur principalement dans l'industrie, mais également dans certains appareils ménagers: les ventilateurs, les pompes,...
Le moteur universel et le moteur à courant continu (voir plus bas) sont en théorie également des moteurs asynchrones (dont la vitesse de rotation n'est pas déterminée par la fréquence du réseau), mais on ne les classe pas parmi les moteurs asynchrones.
- Moteur synchrone
- Le moteur synchrone classique a un rotor bobiné et le transfert de la puissance se fait par des bagues. Ces moteurs nécessitent un entretien régulier et sont de plus en plus souvent remplacés par des moteurs à aimants permanents. Les aimants coûtent par contre très cher et sont de plus en plus souvent remplacés par un bobinage, mais avec le transfert de puissance par transformateur rotatif.
Le moteur synchrone dispose généralement d'une cage d'écureuil pour permettre un démarrage normal, et puis la vitesse croit jusqu'à la vitesse de synchronisme.
Le moteur à réluctance et le moteur pas-à-pas sont également des moteurs synchrones (dont la vitesse de rotation et même la phase est parfaitement déterminée par la fréquence du réseau).
 Si la charge du moteur est trop importante, il décroche. Tous les moteurs synchrones ont besoin d'une aide au démarrage (cage d'écureuil ou variateur de fréquence). Le moteur synchrone a un meilleur rendement que le moteur asynchrone et est utilisé pour les très grandes puissances en fonctionnement continu, où son meilleur rendement par rapport au moteur asynchrone est interessant. On l'utilise également dans les voitures électriques.
Si la charge du moteur est trop importante, il décroche. Tous les moteurs synchrones ont besoin d'une aide au démarrage (cage d'écureuil ou variateur de fréquence). Le moteur synchrone a un meilleur rendement que le moteur asynchrone et est utilisé pour les très grandes puissances en fonctionnement continu, où son meilleur rendement par rapport au moteur asynchrone est interessant. On l'utilise également dans les voitures électriques.
- Le moteur pas-à-pas et le moteur à réluctance variable
- Le moteur à réluctance variable est un moteur de la famille des moteurs synchrones. Il connait actuellement un regain d'intérêt car il a été choisi comme moteur principal dans les voitures Tesla. Il est également utilisé dans l'industrie (grosse puissance, fonctionnement continu et variation de la vitesse).
Le moteur pas-à-pas est souvent un moteur à réluctance variable (image à droite) [tous les moteurs pas-à-pas ne sont pas des moteurs à réluctance variable]. Le moteur saute d'un pas (15° dans ce cas) quand on alimente le bobinage suivant. Il s'agit d'un moteur à 4 bobinages, mais on trouve également des moteurs à trois bobinages qui peuvent être alimentés en triphasé (via un variateur de vitesse adapté).
- Moteur à courant continu et moteur universel (deux versions d'un même moteur)
- Le moteur universel fonctionne aussi bien sur du continu que sur l'alternatif. Alimenté en alternatif, il n'est utilisé que pour des puissances limitées (moteur de foreuse, d'aspirateur, etc). Il est compact et a une puissance très élevée comparée aux autres types de moteur. Son rendement est par contre mauvais à cause de la réaction d'induit.
Le variateur de vitesse d'un moteur universel est très simple à réaliser.
- Moteur à répulsion-induction
- Le moteur à répulsion-induction ressemble à un moteur universel, mais dont le collecteur du rotor est mis en cours-circuit. Il démarre avec environ les mêmes caractéristiques qu'un moteur universel, mais se transforme en moteur asynchrone (moteur à induction) à partir d'une certaine vitesse de rotation.
- Moteur de voiture électrique
- Quel type de moteur utilise-t-on dans les voitures électriques? Les voitures électriques sont récentes, et déjà on voit une évolution très nette dans le type de moteur utilisé.
Les moteurs asynchrones, synchrones et à réluctance variable peuvent être alimentés via un variateur de vitesse qui permet un démarrage souple sans appel de courant trop élevé.
Classification en types de machines
Il s'agit d'une classification assez générale qui ne reprend pas les types anciens. La classification est assez fantaisiste, avec une séparation entre moteur synchrone à rotor bobiné et moteur à aimants permanents, alors que le principe de fonctionnement est identique.
- Nous avons d'abord le moteur universel, avec des balais et un collecteur. Le rotor et le stator sont bobinés en série. Ce moteur est appellé universel, car il peut être alimenté en alternatif ou en continu.
Quand le moteur est entrainé, il fonctionne en dynamo (la dynamo n'est plus utilisée qu'à l'école dans les cours d'électricité). En pratique la dynamo n'était que rarement utilisée avec le bobinage du rotor en série (mauvaise régulation de la tension fournie).
Ce moteur peut également être alimenté avec une tension indépendante sur le rotor et le stator. Ce sont alors des moteurs à courant continu, utilisés dans l'industrie, les trams et les trains. Ce type de moteur est remplacé par d'autres types plus fiables et/ou ayant un rendement plus élevé.
- Le moteur à courant continu et aimants permanents remplace de plus en plus les moteurs universels pour les applications à caurant continu (applications dans les voitures: petits moteurs d'essuie glace,...). Le moteur à aimants permanents ne travaille qu'avec du continu et on peut changer le sens de rotation en modifiant la polarité du courant.
- Le moteur synchrone classique est un moteur à rotor bobiné ou à aimants permanents. Ce type de moteur fonctionne également en alternateur (c'est le type le plus utilisé de générateur). Ce type de moteur démarre très mal sur le réseau électrique et est souvent équipé d'une cage d'écureuil pour aider au démarrage (voir le type suivant).
- Le moteur asysnchrone est le moteur le plus utilisé. Il est également appellé moteur à induction. Le rotor n'est normalement pas bobiné (on a fabriqué des moteurs à rotor bobiné). Le rotor n'a pas de poles, c'est le stator qui produit les poles par induction. Le rotor dispose d'une cage en cuivre ou en aluminium qui peut être assimilée au secondaire d'un transformateur, dont le primaire est le stator.
Nous arrivons maintenant à la partie des moteurs qui doivent être commandés par un système électronique.
- Nous avons les moteurs à aimants permanents alimentés en triphasé, surtout utilisés pour les très grandes puissances où le rendement doit être le plus élevé possible. Il n'y a en pratique pas de grandes différences entre les moteurs à aimants internes ou externes, ou les moteurs à rotors bobinés (la programmation du variateur de fréquence peut être différente).
- Le moteur pas-à-pas est basé sur la réluctance (résistance magnétique): le moteur cherche à réduire la résistance magnétique et donc à aligner le pas du rotor sur le pas du stator actif. Ce sont également des moteurs qui ont besoin d'une commande électronique.
- Le moteur à réluctance variable est la version moderne du moteur pas-à-pas. On en parle pas à l'école, alors que c'est un moteur qui sera beaucoup utilisé à l'avenir (voitures électriques). Le moteur à réluctance variable a souivent un rotor avec des aimants permanents pour améliorer les caractéristiques. Certains moteurs à réluctance variable peuvent démarrer directement sur le réseau triphasé comme un moteur asynchrone.
 Moteur à droite
Moteur à droite
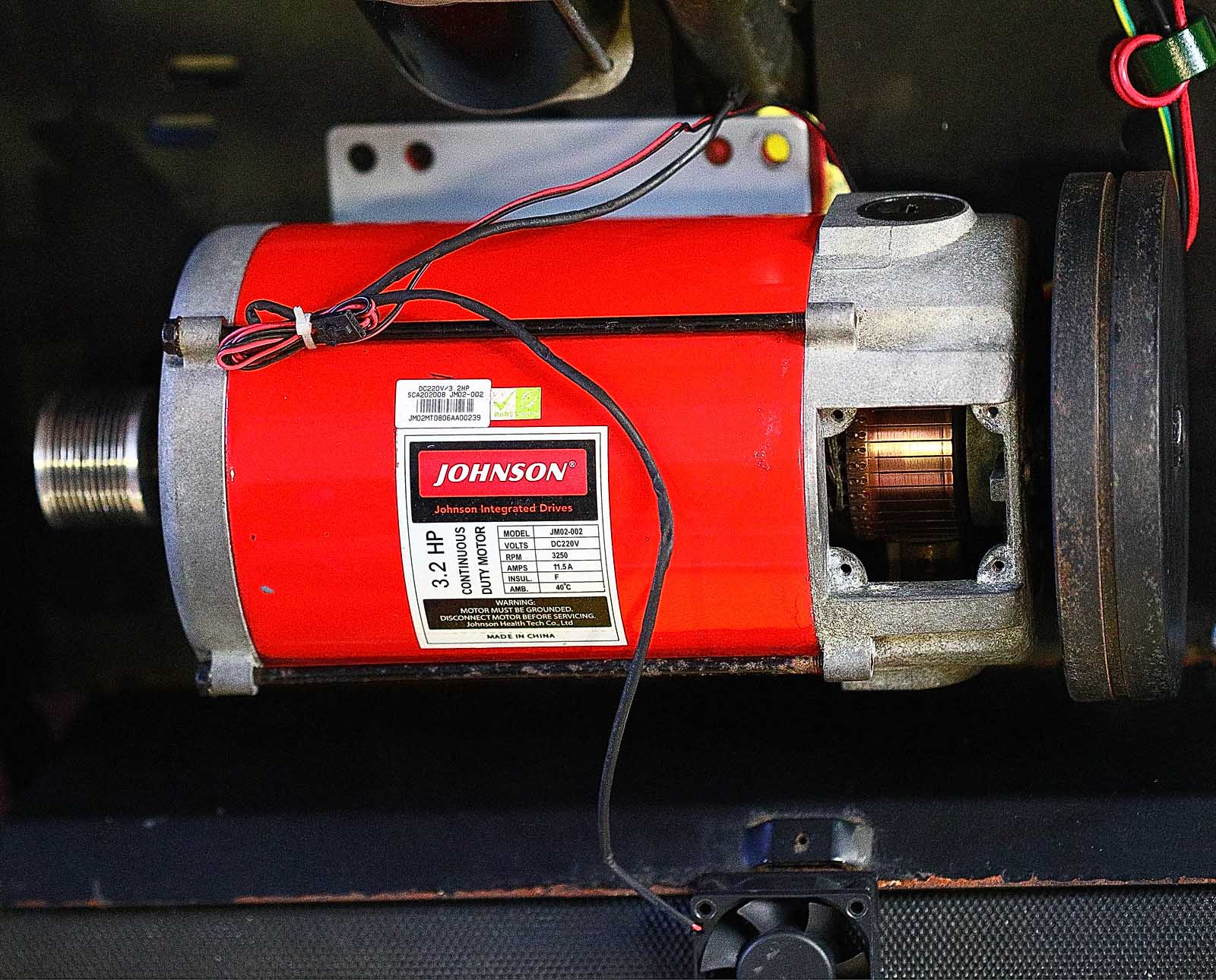
Le moteur à courant continu existe encore. Il est devenu moteur universel quand il peut être alimenté en continu et en alternatif.
Le moteur à courant continu utilise souvent des aimants permanents au stator (comme sur l'exemple). Comme le champ statorique est fixe dans ce cas, le moteur ne peut être alimenté qu'en continu. La régulation de la vitesse est très simple et dépend de la tension appliquée. Le couple est élevé et constant et la taille du moteur est limitée pour la puissance qu'il peut fournir. Comme le champ magnétique est fixe, le couple est également relativement constant.
Ces moteurs sont utilisés dans tapis de course dans les salles de fitness (treadmill) où ils permettent un réglage de la vitesse très simple. Ils sont également utilisés dans les voitures où le courant est continu: essuies-glaces, pompes électriques, lève vitre,...
Le point négatif de ces moteurs sont les charbons, qu'il faut régulièrement remplacer. On voit très bien le collecteur car le ventilateur qui se trouve normalement dans l'ouverture a été enlevé. Le ventilateur permet un refroidissement correct du moteur quel que soit sa vitesse de rotation.
Le démarrage de moteurs est expliqué ici. Tous les systèmes utilisés passent en revue: le démarrage par résistances, par autotransformateur, via un soft-starter ou un variateur de fréquence et bien sûr le système étoile-triangle.
Tout comme les générateurs les moteurs synchrones et asynchrones ont des enroulements statoriques répartis. La fonction est différente: ici il s'agit d'équilibrer le couple sur la rotation tandis que dans le cas d'alternateurs il s'agit de produire une tension plus sinusoïdale.
|
 Moteur à droite
Moteur à droite