| Le régulateur de Thury était un des premiers régulateurs de tension utilisés. |
-
Les dynamos n'étaient pas encore compensées et devaient travailler sous une charge constante. Les balais étaient réglés pour avoir le moins d'étincelles en charge normale. Les lampes étaient directement reliées à la dynamo pour éviter une marche à vide. Bien qu'un montage compound bien adapté permet de relativement bien stabiliser la tension, il est parfois nécessaire d'avoir une stabilisation de la tension. Le système le plus simple se compose d'un électro-aimant alimenté par la tension de secteur (fils A et B). L'électro-aimant maintenu par un ressort fait se déplacer deux poulies. Selon que la tension est trop basse ou trop élevée, une des deux poulies est mises en contact avec un entrainement, qui fait tourner l'axe dans un ou dans l'autre sens. Plus ou moins de résistances sont mises ens ervice, ce qui limite le courant dans l'inducteur.
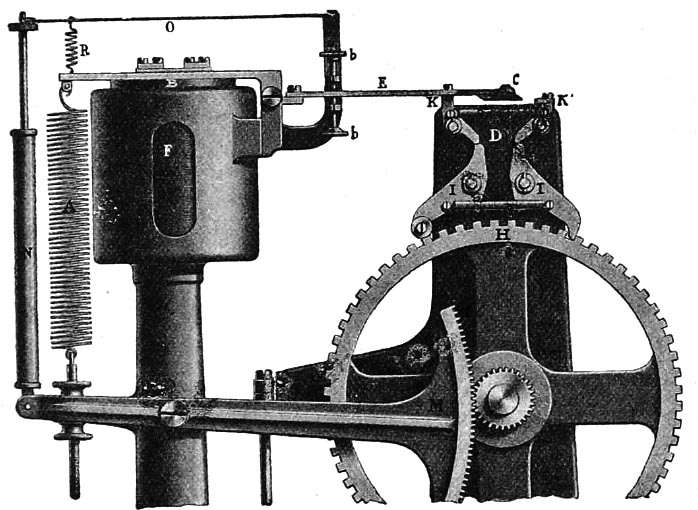
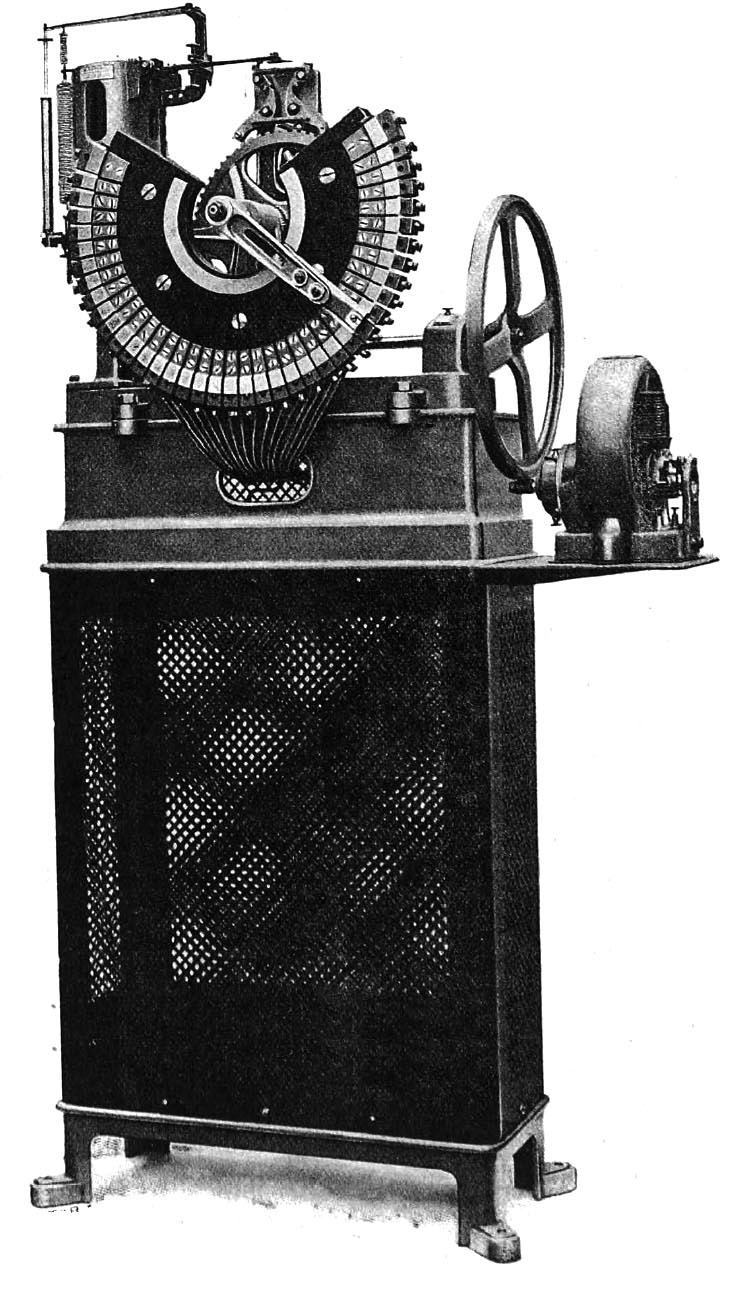
Régulateur de ThuryLe régulateur mécanique Thury est un des premiers régulateurs employés commercialement pour stabiliser la tension du générateur. Dans les dépliants de l'époque on écrivait que "le régulateur de Thury peut avantageusement remplacer l'employé de service qui doit continuellement observer l'aiguille du voltmètre".A cette époque on avait aussi bien des réseaux à courant continu que des réseaux à courant alternatifs. René Thury a même lancé un réseau haute tension à courant continu constant pour le transport du courant continu sur de longues distances. Ce régulateur était tout aussi bien utilisé pour les réseaux alternatifs que continu. Le but du régulateur est de maintenir constante la tension du réseau électrique en augmentant ou en diminuant le courant d'excitation du générateur. Le générateur est souvent une dynamo qui fournit l'électricité à un petit réseau local ou une dynamo d'excitation qui fournit le courant d'excitation à un gros alternateur alimentant toute une région. La mesure de la tension du secteur se fait par la bobine F (la tension de secteur est préalablement réduite à une tension plus faible). La bobine B composée d'un gros fil est parcouru par une partie du courant d'excitation. Cette seconde bobine qui a un effet moindre améliore la stabilité du réglage en réagissant plus vite que la tension du générateur. Le régulateur forme une sorte de balance mécanique: l'électro-aimant entraine un levier E terminé par une butée C. Une bascule D reçoit un mouvement de va-et-vient permanent via un petit moteur externe. Selon la position de la butée C un système de cliquets K-I ou K'-I' sont mis en fonction et entrainent la roue H dans un sens ou dans l'autre. Quand la tension du réseau est égale à la tension de consigne le levier se trouve à mi-course et aucun cliquet n'est actif. La roue H entraine un cadran à touches qui permet de mettre plus ou moins de résistances en service. Le moteur auxiliaire produit deux cliquets par seconde. La roue qui a 40 dents actives passe d'une position extrème à l'autre en 20 secondes, ce qui est suffisant. Il y a autant de dents que de contacts sur le cadran. Il y a plusieurs éléments qui assurent la stabilité de la régulation: Il y a un réglage du statisme (droop) assuré par le secteur M entrainé par la roue H et qui va agir sur les ressorts A et R (R via un amortisseur à huile N). Le but de ce système est de ne pas forcer à tout prix une stabilisation de la tension de secteur, mais de permettre un petit jeu: quand la consommation est élevée ce système permet une légère réduction de la tension d'alimentation.
Ce système mécanique permet de stabiliser la tension électrique ou toute autre valeur physique. Il permet par exemple de stabiliser la pression dans un système hydraulique en variant la vitesse du moteur entrainant le compresseur.
Mais le régulateur de Thury a également un inconvénient: le "pas" de la correction est constant et dépend de la vitesse du moteur entrainant la bascule à cliquets. Le but de la correction mécanique assistée par un moteur, c'est qu'une petite variation de la valeur à mesurer par rapport à la consigne produise une commande suffisamment puissante pour entrainer le cadran a touches. Dans une régulation plus intelligente la variation de la correction (le "pas" de la correction, comme dans le premier exemple) diminue quand la valeur se rapproche de la consigne. C'est cet inconvénient qui est réduit en utilisant également le courant d'excitation dans la boucle de réglage. A cause de la self induction, la tension de secteur réagit avec un retard à la tension d'excitation. On peut ainsi "prévoir" la tension de secteur en se basant sur le courant d'excitation. Le régulateur de Tirrill est également basé sur ce principe. Le régulateur de Brown-Bovery est basé sur le principe de la balance comme le régulateur de Thury mais utilise une mécanique plus élaborée qui permet de se passer du moteur de commande. |
Publicités - Reklame