| Les dynamos d'une certaine puissance doivent être équipés d'enroulements de compensation (très fortes puissances) et de pôles de commutation (à partir de puissances moyennes). |
-
Compensation d'une dynamo
Nous avons appris sur cette page qu'une dynamo produit du courant continu et qu'une partie du courant est utilisé pour produire le champ magnétique.
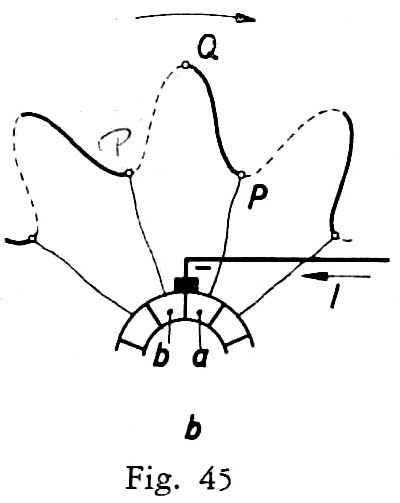
 La tension est maximale si elle est prélevée sur la ligne neutre, mais en plus la différence de potentiel entre deux lames de collecteur est plus faible. Si les charbons sont mal calés par rapport au flux magnétique (et donc par rapport au maximum de tension induite), la tension récoltée est moindre, mais de plus, il y a une différence de potentiel plus élevée entre les lamelles voisines du collecteur (trait rouge). L'épaisseur des charbons est donné par les traits noirs. Cette différence de potentiel produit des étincelles qui usent les balais.
Les charbons ont toujours une largeur supérieure à celle d'une lamelle de collecteur pour qu'il y ait toujours contact. Dans certaines machines à basse tension, les charbons font même contact avec 3 lamelles consécutives.
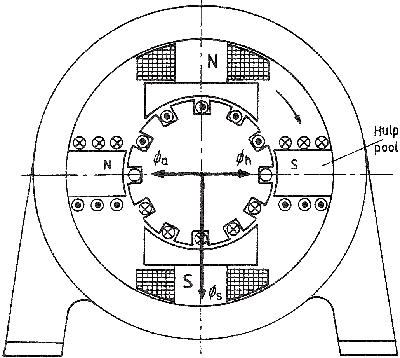
Correction de la réaction d'induit(réaction magnétique transversale d'induit)En charge, l'induit est parcouru par un courant, ce qui provoque à son tour un champ magnétique "parasite" qui dépend de la charge: c'est la réaction d'induit qui doit être compensée pour stabiliser le champ magnétique et donc stabiliser le fonctionnement de la dynamo. Cette compensation est d'autant plus nécessaire qu'elle produit un déplacement de la ligne neutre, et nécessite donc le "déplacement" des balais pour capter la tension maximale (permettant également d'éviter une tension trop importante entre lamelles de collecteur voisines). Les premières dynamos industrielles qui étaient par exemple utilisées pour la galvanoplastie ou pour l'éclairage des ateliers (charge relativement constante) avaient leur balais calés sur la ligne neutre en charge nominale. Ces dynamos produisaient beaucoup d'étincelles quand elles travaillaient à vide.
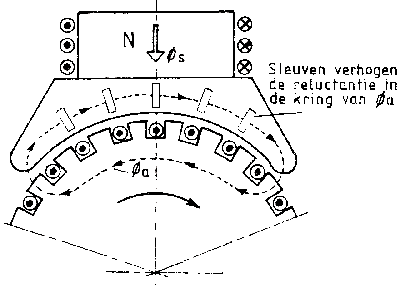
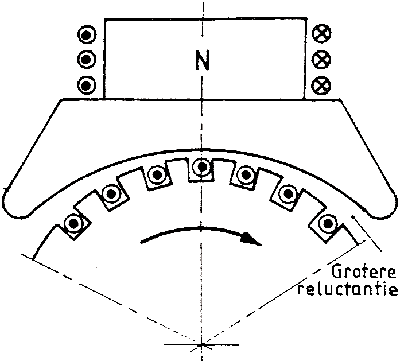
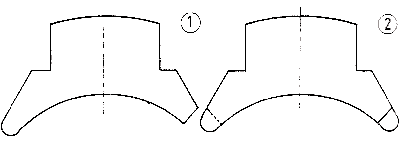
L'effet du déplacement de la ligne neutre peut être réduit de diverses façons: en rendant l'entrefer plus important sur le coté des pièces polaires ou en coupant un coté des lamelles qui constituent les pièces polaires. On les les monte ensuite alternativement avec la partie coupée à gauche et à droite pour en augmenter la réluctance (et donc diminuer le champ magnétique au bord de la pièce polaire). L'effet du déplacement du champ par la réaction d'induit est ainsi limité. On peut également construire une pièce polaire avec un entrefer interne (voir schéma), ce qui réduit le champ rotorique (qui provoque le déplacement de la ligne neutre) sans diminuer le champ principal. Ces mesures ne produisent qu'une réduction de l'effet. Pour l'éliminer complètement il faut utiliser des mesures plus drastiques: les enroulements de compensation ou des poles de compensation.
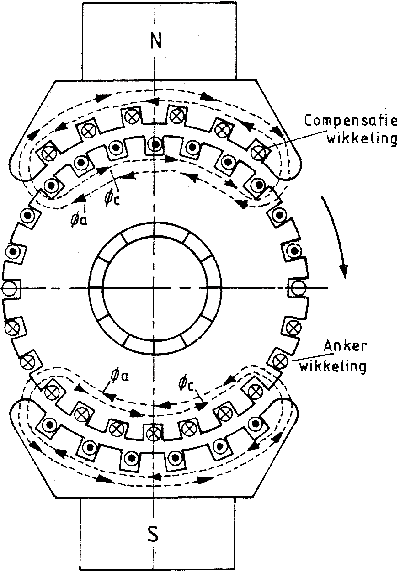
Enroulements de compensationLes enroulements de compensation sont intégrés dans les pôles principaux dans les très grosses dynamos. Ils ne sont pas utilisés dans les dynamos de puissance moyenne.
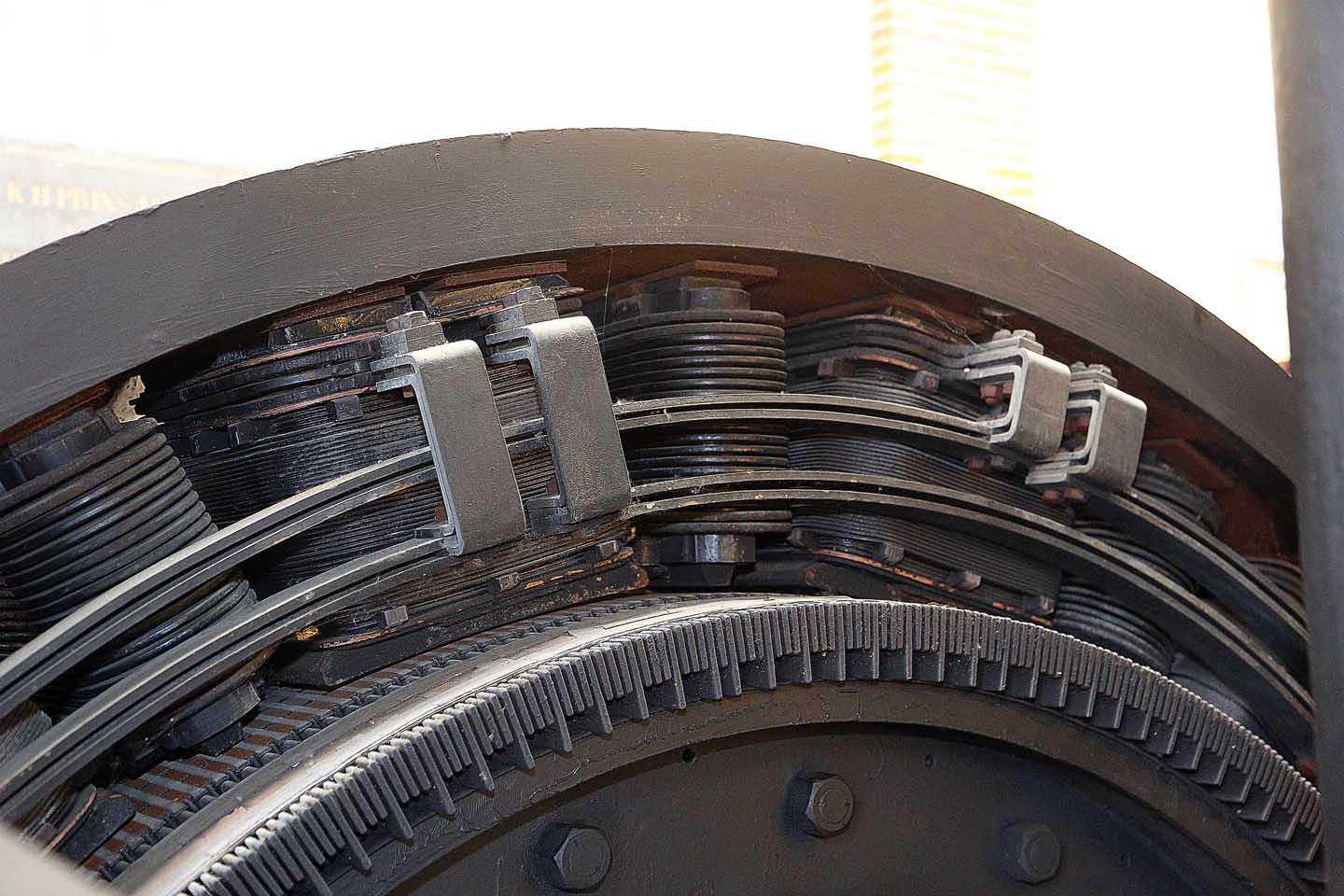
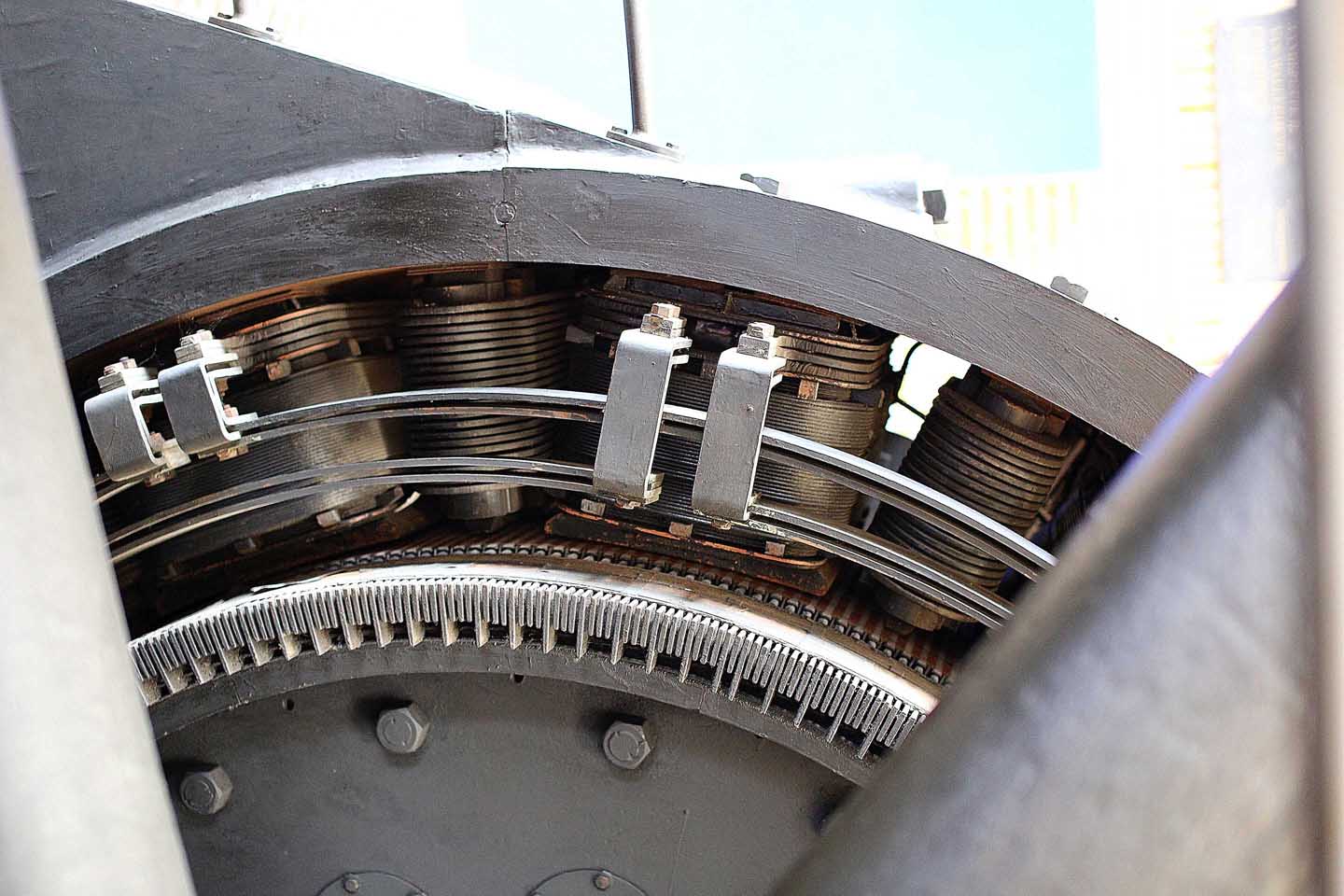
Pôles de commutationLes pôles de commutation sont plus fins que les pôles principaux et situés entre les deux. Ils se composent de quelques spires alimentées en série avec l'induit. Les pôles de commutation corrigent également le glissement du champ magnétique selon la charge (pour les dynamos moyennes qui n'ont pas d'enroulements de compensation). Les dynamos qui ont des enroulements de compensation ont des pôles de commutation parcourus par un courant constant. Le changement de régime de la dynamo provoque également un déplacement de la ligne neutre. Pour éviter cela, on fait travailler les grosses dynamos à vitesse constante. La dynamo est ici accouplée à un alternateur dont la vitesse de rotation doit nécessairement être stable (photos à droite musée "stoom en stroom" d'Izegem). Les schémas de cablage ne reprennent souvent pas les enroulements de compensation, puisque le cablage est fixe. Le nombre de spires est déterminé en usine et n'est plus modifié par après.
Quelle est la différence entre les pôles de commutation et les enroulement de compensation?
Comme vous le voyez, une dynamo est une machine bien plus complexe qu'un alternateur...
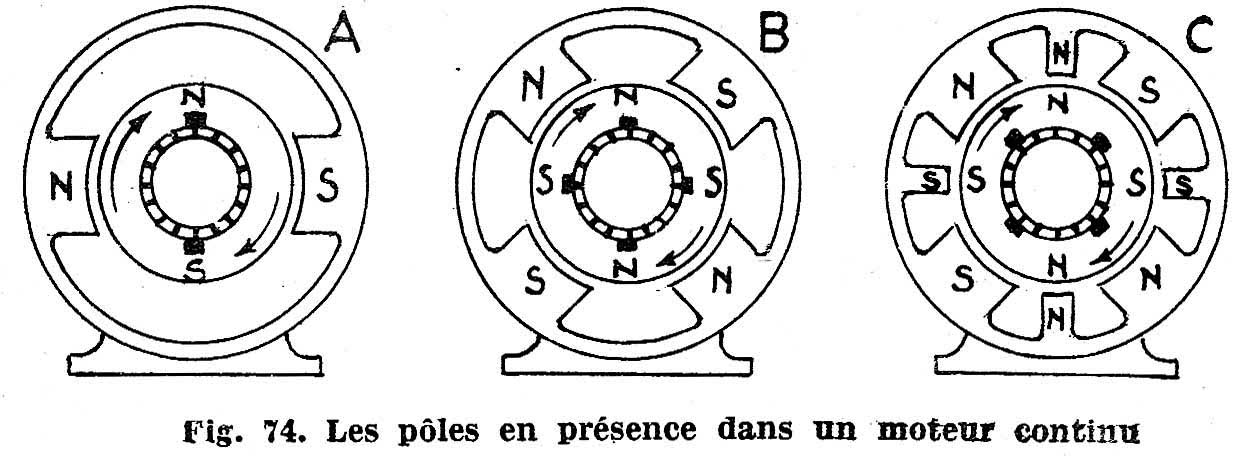
Moteurs à courant continuPôles de commutation ou déplacement des balais?On voit successivement un moteur à deux pôles, un moteur à quatre pôles et un moteur à quatre pôles avec compensation. Plus le nombre de pôles est important, et plus l'influence du courant d'induit se fait sentir. Pour augmenter la puissance des moteurs on tente d'augmenter le nombre de pôles, puisque chaque double pôle est en fait un moteur. Les moteurs à courant continu dont la charge est constante n'ont pas besoin de pôles de commutation, puisque le courant dans l'induit est constant. Ces moteurs ont des balais qui peuvent être déplacés. On cale les balais en fonctionnement en charge pour qu'il y ait le moins d'étincelles. Ce moteur produit de très fortes étincelles à vide. Un système de déplacement des balais est plus simple à mettre en œuvre, mais il ne peut être utilisé qu'avec des moteurs dont la charge est relativement constante. En comparaison, les pôles de commutation s'adaptent automatiquement à la charge du moteur, mais prennent de la place dans le stator et consomment un peu de puissance. La plupart des moteurs à courant continu sont cablés en parallèle (shunt), ce qui permet une vitesse relativement constante indépendamment de la charge. Le couple (qui dépend de la tension au stator) est constant, et c'est une caractéristique fort appréciée. Les moteurs série ont un couple de démarrage très élevé mais s'emballent à vide. Ils ont été utilisés comme moteur de traction ferroviaire à cause de leur couple à l'arrêt élevé. Les moteurs universels actuels sont des moteurs série (il n'est pas possible de faire fonctionner correctement un moteur shunt sur de l'alternatif). Les moteurs à courant continu dont la vitesse doit être variable ont une double alimentation: pour le stator (déterminant le couple) et pour le rotor (déterminant la vitesse). C'est cette caractéristique qui fait que les moteurs à courant continu ont été utilisés très longtemps dans des applications pointues où il faut une vitesse et un couple réglable. |
Publicités - Reklame