| Le 400Hz (fréquence de réseau) est utilisé dans l'aviation et la marine de guerre. Comment en est-on arrivé à une telle fréquence? |
-
Réseau 400Hz
Ce n'est pas pour mettre tout le monde d'accord que l'aviation a choisi une fréquence de 400Hz, c'est pour des raisons bien pratiques.
Image 1:
Apparition du 400Hz pendant la seconde guerre mondialeL'utilisation du 400Hz est apparue pendant la seconde guerre mondiale en Angleterre. L'appareillage des avions, devenant de plus en plus complexe (radio, radar, anti-radar, gonio,...), avait besoin de plus en plus d'énergie électrique, mais il n'était pas possible de redessiner le compartiment de l'avion. On a donc demandé aux ingénieurs de fabriquer un générateur qui puisse fournir 800W au lieu de 500W, tout en utilisant le même emplacement. Les ingénieurs ont ainsi lancé le 400Hz.
Image 2: Le transfo classique pèse pratiquement un kilo, le transfo de l'alimentation à commutation fait moins de 100g. Le gain en 400Hz n'est pas aussi important, mais est malgré tout conséquent en aviation, où chaque kilo économisé "rapporte" plusieurs kilos. En effet, un avion utilise de nombreux moteurs et appareils auxiliaires. Chaque kilo d'éliminé permet d'utiliser une structure portante moins lourde, et donc d'à nouveau économiser du poids. L'avion moins lourd peut effectuer un vol de plus longue distance ou utiliser des réservoirs moins grands. Chaque kilo éliminé permet de réduire le poids de l'avion de 2 kilos. Une petite note: les premiers grands ordinateurs (après la seconde guerre mondiale) étaient prévus pour fonctionner avec du 400Hz, aussi étrange que cela puisse paraitre. Il faut savoir que ces ordinateurs avaient principalement un but militaire (guerre froide...). De plus, l'armée disposait d'un stock de générateurs 400Hz récupérés du champ de bataille (et de l'expertise nécessaire pour les entretenir). Ces ordinateurs consommaient une puissance très élevée et avaient besoin d'une tension bien stable sans ondulation résiduelle. L'utilisation d'une fréquence plus élevée permet d'utiliser des condensateurs de filtrage 6× plus petits. Ces ordinateurs étaient classés “top secret” et hors d'accès du commun des mortels. Les bases militaires utilisant de tels ordinateurs avaient leur propre générateurs électriques (60Hz pour les communs, 400Hz pour les ordinateurs et les appareils militaires comme le radar de poursuite, etc).
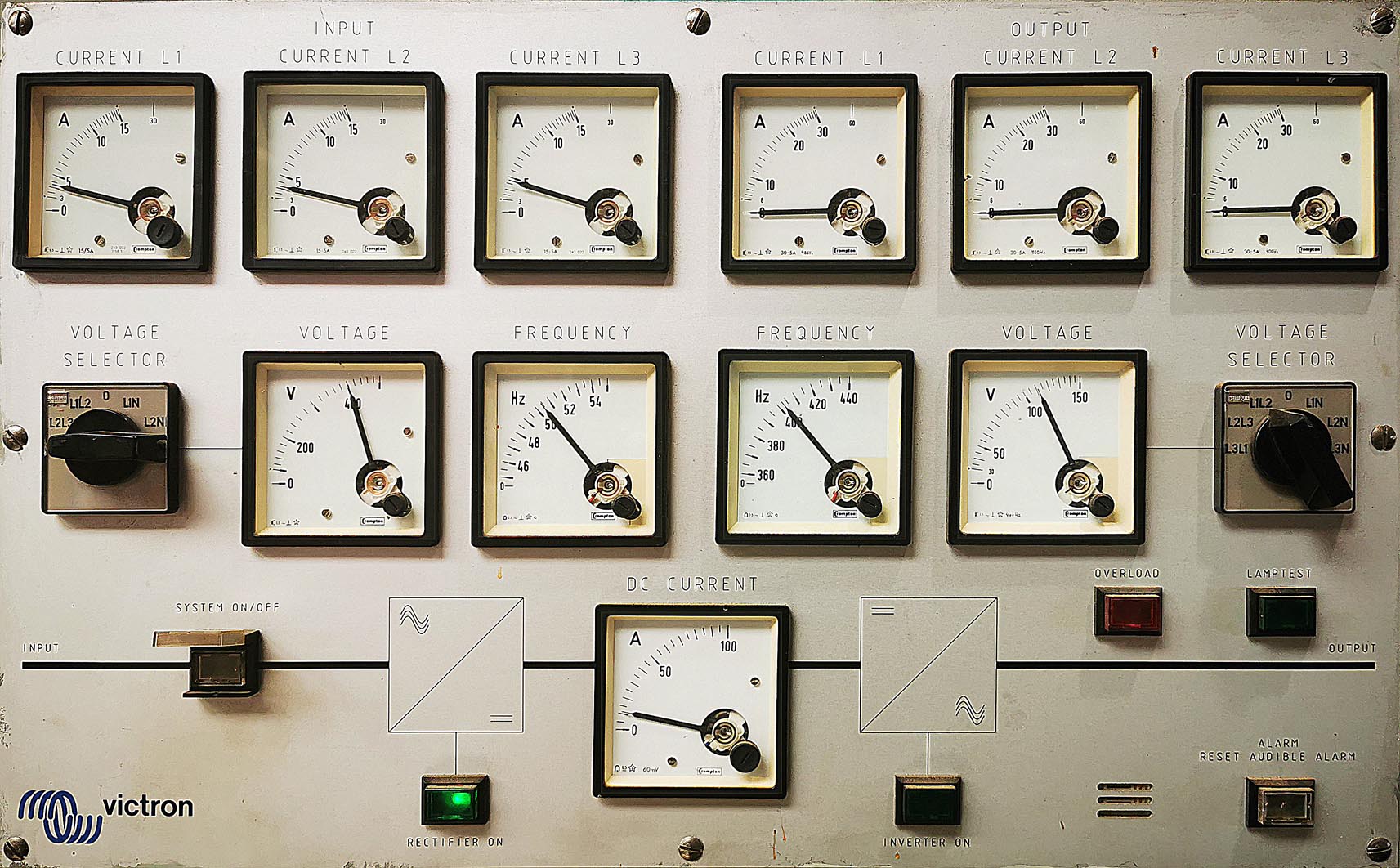
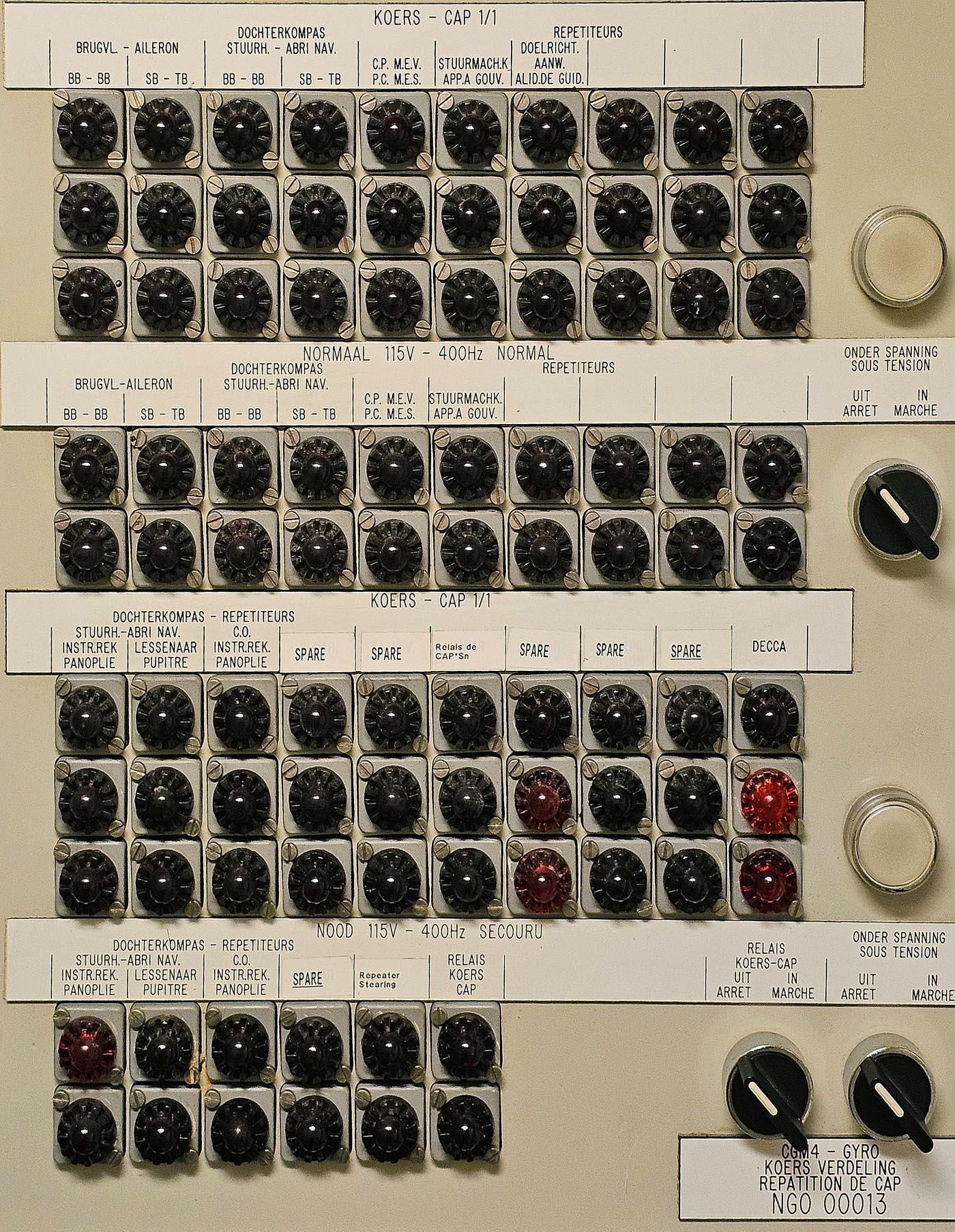
Image 4:
Avantages du 400HzLa puissance transmise dans un transfo ou un moteur dépend de la variation de flux magnétique. Un transfo qui travaille à 400Hz peut ainsi transmettre 8× plus de puissance du primaire au secondaire qu'un transfo similaire travaillant sous 50Hz. On peut donc utiliser des transfos plus petits à puissance identique, ce qui est très important dans les avions où chaque kilo épargné compte. Et par l'effet boule de neige, on en arrive à gagner plus du double de poids: en effet un transfo plus leger permet des structures portantes plus légères, il faut un peu moins de carburant, donc des réservoirs plus petits, etc.Le même effet est visible dans les alimentations à découpage qui transforment le 50Hz en 25kHz (si pas plus) et ne nécessitent qu'un tout petit transfo, alors que les alimentations classiques à transfo sur 50Hz sont lourdes et encombrantes. Il en va de même des moteurs, mais ici on a un second avantage qui est leur vitesse de rotation qui peut être plus élevée. Un moteur alimenté en 50Hz tourne au maximum à 3000 tours/minute (vitesse synchrone au réseau). Avec une fréquence de réseau de 400Hz, la vitesse de rotation maximale d'un tel moteur est de 24000 tours/minute (notez qu'on n'utilise pas de moteurs dits "universels" en aviation: ceux-ci sont trop peu fiables et produisent trop de parasites pour pouvoir envisager leur utilisation dans des avions). Les gyrocompas tournent à 12000 tours, ce qui est facilement réalisable avec un moteur 400Hz, mais impossible avec un moteur classique. Une vitesse de rotation plus faible est possible en augmentant le nombre de pôles. De plus, on a utilisé des amplificateurs magnétiques dans l'avionique (la première utilisation connue était le guidage des V2 allemands). Un amplificateur magnétique est une inductance saturable qui ressemble fort à un transfo (mais ne fonctionne pas de la même manière). L'utilisation d'une fréquence plus élevée permet un gain de poids et une réponse plus rapide. Malgré leur poids en comparaison des circuits électroniques, on a continué à utiliser des inductances saturables au lieu de thyristors à cause de leur fiabilité légendaire. Même le Concorde utilisait des inductances saturables. Aux amplificateurs magnétiques, il faut encore ajouter les synchros et selsyns (résolveurs) souvent utilisés dans l'avionique et la navigation. L'utilisation d'une fréquence plus élevée permet une réponse plus rapide du système (en plus du gain de poids des capteurs).
Utilisation actuelle du 400HzNous avons donc surtout des raisons historiques pour utiliser le 400Hz, puisque l'avènement de l'électronique de puissance à partir des années 1980 a permi de fabriquer des commandes de puissance à fréquence variable, permettant d'adapter précisément la vitesse de rotation des moteurs. Par contre, un alternateur qui produit du 400Hz est toujours plus compact qu'un alternateur qui produit du 50 ou 60Hz, c'est pour cela que le réseau primaire à bord des avions est toujours à 400Hz (115/200V triphasé).Le réseau 400Hz n'est pas utilisé au sol, car les pertes au transport augmentent avec la fréquence et la distance: pertes par induction à proximité de matières ferro-magnétiques (structures métalliques), pertes par self-induction (conducteurs groupés), pertes par capacité entre les conducteurs,... Le skin effect (effet de peau) est causé par le courant qui à tendance à éviter le centre des conducteurs, obligeant les fabricants à utiliser des brins isolés.
Image 5: Les avions de ligne récents n'utilisent plus une fréquence fixe (générateur indépendant), mais la fréquence dépend du régime des moteurs de propulsion. Il y a plusieurs réseaux dans l'avion (non-interconnectés) dont la fréquence dépend du régime du moteur correspondant. La fréquence peut ainsi varier indépendamment de 360 à 800Hz selon le régime du moteur. Cela ne pose pas de problèmes pour l'éclairage et les appareils électroniques (fixes ou mobiles) qui sont tous équipées d'un redresseur et d'une alimentation à découpage (écrans de télévision, chargeur pour portable, tablette, smartphone, etc).
Image 6: |


Publicités - Reklame