|
La construction des disques dur n'a pas changé fondamentalement au fil des années. Il y a un nombre de plateaux magnétisés qui portent l'information sur des pistes concentriques. Les têtes de lecture peuvent se déplacer de l'extérieur à l'intérieur du plateau.
Contrairement aux disques vinyls et CD, il n'y a pas une seule piste qui commence à l'extérieur ou à l'intérieur et se termine de l'autre coté mais un nombre de pistes parfaitement concentriques. Une piste continue (en serpentin) n'est pas nécessaire en cas d'accès direct. De plus la piste unique était incompatible avec les premiers systèmes de positionnement des têtes. |
-
Construction
La première photo montre un ancien disque dur (cliquez sur la photo pour un agrandissement): le moteur pas à pas est à gauche à l'avant plan et commande le porte-têtes par un système compensé thermiquement. Les moteurs linéaires utilisent une tension pour faire déplacer la tête: positif et la tête de déplace vers le centre, négatif et la tête se déplace vers la périphérie. La valeur de la tension détermine la vitesse de déplacement: plus la tension est élevée, et plus l'accélération est forte. Ce système n'a pas de position fixe, mais se déplace librement entre deux extrèmes. Il faut donc que les têtes produisent un signal de positionnement pour maintenir la tête sur la piste (servo). |



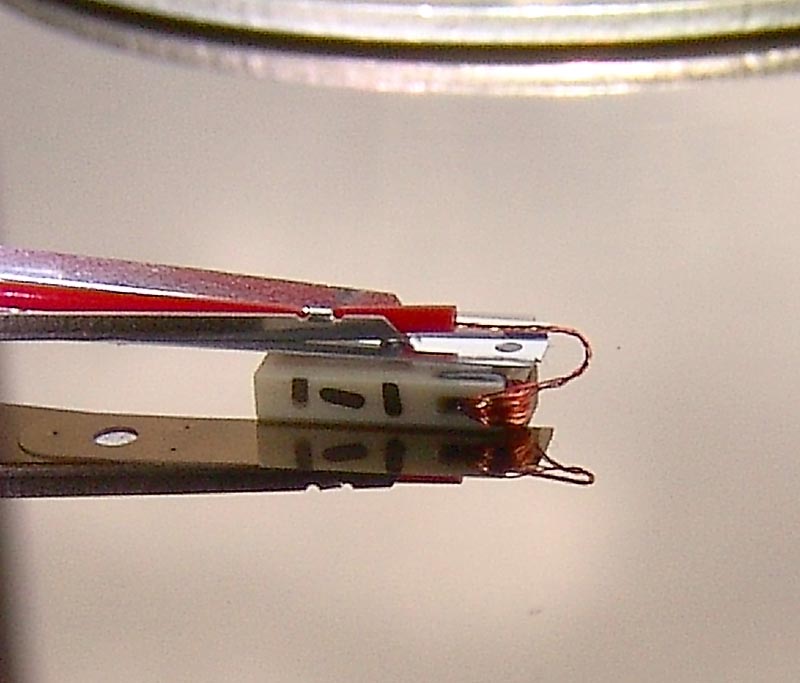
La tête
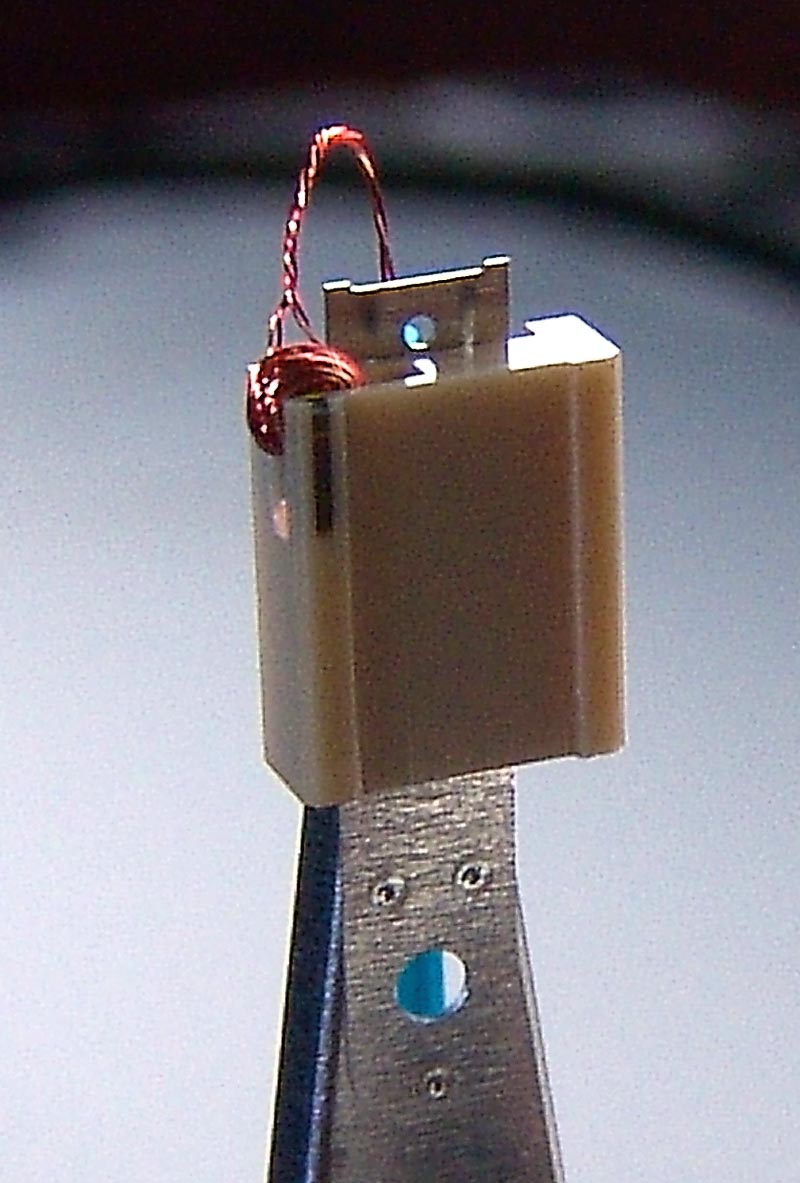
Un des premiers problèmes qu'il a fallu résoudre est l'usure des têtes et du substrat magnétique. Les têtes ne touchent plus les plateaux en rotation mais flottent sur un coussin d'air microscopique.
Le coussin d'air est formé par un bloc en céramique de forme appropriée. Une découpe du bloc céramique fait s'engouffrer l'air sous la tête. La circulation intense de l'air (provoquée par la rotation des plateaux) fait que les têtes décollent de la surface du disque en mouvement. Les têtes appuyent sur le plateau avec une force de plus de 250g. C'est cette force qu'il faudra neutraliser pour que les têtes puissent décoller. La circulation d'air est en mesure de contre-carrer totalement la pression, même si la tête fait moins d'1 mm de surface. Le mécamisme des têtes est monté en oblique (avec une pression verticale plus forte vers l'extérieur du disque) pour compenser la variation de vitesse linéaire (et donc le flux d'air sous la tête et l'effet coussin d'air).
|

Enregistrement et reproduction
 Les premières têtes étaient fort comparables aux têtes des enregisteurs à bande (ou à cassette). Chaque tête se composait d'un petit électro-aimant qui magnétise la couche métallique dans un sens ou dans l'autre (enregistrement longitudinal, dans la longueur). Lors de la lecture, le champ magnétique produit un faible courant électrique dans le bobinage.
Les premières têtes étaient fort comparables aux têtes des enregisteurs à bande (ou à cassette). Chaque tête se composait d'un petit électro-aimant qui magnétise la couche métallique dans un sens ou dans l'autre (enregistrement longitudinal, dans la longueur). Lors de la lecture, le champ magnétique produit un faible courant électrique dans le bobinage.
L'augmentation de la densité (nombre de données par millimètre) se fait au détriment de la taille des îlots magnétiques. Plus les îlots magnétiques deviennent petits, et plus le signal produit est faible. Plus les îlots sont petits, et plus ils sont succeptibles de perdre leur magnétisation. Il y a une limite au nombre de données qu'on peut enregistrer par millimètre. Il est possible d'enregistrer le signal perpendiculairement (en profondeur) en modifiant la forme de la tête qui devient asymmétrique. Les îlots sont maintenant verticaux et peuvent avoir une "surface au sol" plus petite, tout en contenant la même quantité de matériau magnétisable: en lecture le signal électrique est toujours aussi fort fort, même si la densité de l'enregistrement est plus importante. Il faut prévoir une couche bonne conductrice magnétique sous la couche magnétique.  On s'est rendu compte assez vite qu'une seule tête aussi bien pour l'enregistrement que pour la lecture n'est pas idéale. Les enregistreurs HiFi utilisent également une tête séparée pour l'écriture et la lecture. La tête d'un disque dur se compose de deux éléments: une tête électro-magnétique classique pour l'enregistrement, et une tête magnéto-résistive pour la lecture. Une tête magnéto-résistive produit un signal électrique plus important, et permet donc la réduction de la taille des îlots magnétiques sans que le signal récolté ne disparaisse dans le bruit de fond. Les îlots magnétiques peuvent être si petits qu'ils peuvent spontanément perdre leur magnétisation. On travaille ici aux limites de la physique. Le codage effectif des données sur le support (RLL) est décrit sur une page séparée. Ce codage est également utilisé pour d'autres supports: CD et DVD. |
Tracking
Il y a au début de chaque bloc de donnée un code d'adresse qui indique le numéro de piste et de secteur, mais cela ne suffit pas: il s'agit simplement d'un adressage, pas d'un système de suivi de piste (tracking). Utiliser l'amplitude du signal pour déterminer si on est au milieu de la piste n'est pas la bonne solution. Les pistes sont écrites les unes contre les autres, ce qui fait qu'il n'y a jamais de zone vierge. Une réduction du signal est causé par une contamination, par par la tête qui se trouve à coté de la piste! Le système utilisé a fait ses preuves dans les magnétoscopes V2000 et video-8. On va notament utiliser la diaphonie (le signal des pistes adjacentes) pour corriger le positionnement. C'est un système ingénieux qui fonctionne parfaitement. La réalisation pratique dépend du fabricant et est un secret technologique.
|
Publicités - Reklame